


News
Join us at the Science Festival in the Technical Museum for a workshop on aerial robotics. The event will take place on Friday, April 26th, from 10:00 to 12:00. The workshop will be held by Larics members: Dario Stuhne, Marijana Peti, Doc. dr. sc. Goran Vasiljevicć, and Izv. prof. dr. sc. Tamara Petrović. Don't forget to visit Larics website and AeroSTREAM website for more information.
Marko Križmančić, prof. dr. sc. Stjepan Bogdan, and Marijana Peti recently concluded their visit to the Czech Technical University in Prague (CTU) from April 10th to April 12th as part of the Aerostream project. During their visit, they had fruitful discussions with Martin Saska and Kristian Hengster-Movric-Movrić, focusing on idea exchange and exploring opportunities for future collaboration.
Join us at MUZZA Science Week from April 12th to 14th! Here's what's in store:
🌿 Dive into the world of plant health measurement with simple electronic circuits. Learn how technology is transforming agriculture and environmental monitoring.
🚁 Embark on an adventure with Aerial Robotics! Witness big drones in action and get hands-on experience by piloting small Crazyflie drones during breaks. You can even try assembling and piloting your own drone!
Our colleague, Ana Milas, MSc, has successfully defended her doctoral dissertation titled "Information gain-based autonomous exploration of 3D environments using an unmanned aerial vehicle" on April 3, 2024. Congratulations to Ana on this significant accomplishment, and best wishes for her future endeavors.
Marko Križmančić, Stjepan Bogdan, and Marijana Peti are planning to visit the Czech Technical University in Prague Technical University (CTU) in Prague from April 10th to April 12th as part of the Aerostream project. They will meet with Martin Saska and Kristian Hengster-Movric-Movrić for idea exchange and future collaboration discussions.
Stay tuned for updates!
The article titled "Structured Ecological Cultivation With Autonomous Robots in Agriculture: Toward a Fully Autonomous Robotic Indoor Farming System" authored by LARICS alumni dr. sc. Marsela Car, along with co-authors Barbara Arbanas Ferreira, Jelena Vuletić, and Matko Orsag, has been accepted for presentation at IEEE RAS ICRA 2024. The article was originally published in the scientific journal IEEE Robotics & Automation Magazine on October 16, 2023, and is available via DOI: 10.1109/MRA.2023.3315934.
As part of the ICSE Factory project, elementary schools are implementing an innovative approach that integrates technology with botanical studies. Students in grades 5 to 8 at Vladimir Deščak Elementary School and Ksaver Šandor Gjalski Elementary School, under the guidance of Professor Dr. Matko Orsag, Milena Jenić mag.ing.agr., and master's student Viktor Horvat, are currently participating in workshops focused on plant cultivation and environmental monitoring.
Professors Stjepan Bogdan and Zdenko Kovačić were featured presenters at the ERF conference held in Rimini, Italy, from March 13th to 15th. Stjepan Bogdan's presentation, titled "Information Gain-Based Autonomous Exploration Using UAVs," demonstrated his expertise in drone technology.
Additionally, Stjepan actively participated as a panelist during a workshop, offering valuable insights.
Professors Zdenko Kovacic and Stjepan Bogdan are currently at the European Robotics Forum (ERF) 2024 in Rimini, Italy, representing the AeroStream project from March 13th to 15th.
Furthermore, Stjepan Bogdan will be delivering a presentation on navigating drones in challenging environments, leveraging his expertise in drone technology. As a panelist during the workshop, Stjepan will offer valuable insights.
We're thrilled to announce that Professors Zdenko Kovacic and Stjepan Bogdan will be attending the esteemed European Robotics Forum (ERF) 2024 in Rimini, Italy, from March 13th to 15th as part of the AeroStream project.
Professor Stjepan Bogdan and Marko Križmančić participated in the review meeting for the Watchplant project, convened at the University of Konstanz from February 26th to 28th, 2024. Partners presented their progress over the preceding six months, with reviewers from the European Commission expressing satisfaction and offering minor feedback. The Project Officer, Darina Botsova, oversaw the proceedings alongside three to four expert reviewers. The team remains committed to advancing their work until year-end, with the subsequent meeting slated for Zagreb. Stay tuned for updates on outcomes and developments.
Prof. Stjepan Bogdan and Marko Križmančić are actively engaged in the review meeting for the WatchPlant project at the University of Konstanz, running from February 26th to 28th, 2024. This project is reshaping plant monitoring and research.
Dario Stuhne and Dean Martinović, LARICS members, participated in the immersive Learning Expedition from February 22nd to 23rd, 2024. Hosted by the AEROSTREAM and IN-TRANSIT projects, this expedition welcomed European SMEs from textile, construction, and advanced manufacturing sectors to explore the dynamic Andalusian Aerospace Sector. With AEROSTREAM's collaboration, the event fostered invaluable partnerships and opened doors to potential collaborations for European SMEs. Our team also had the privilege of visiting Fundación Andaluza para el Desarrollo Aeroespacial CATEC, a leading aerospace technology center in Europe, and delving into insights from various companies within the Andalucía Aerospace Cluster.
Petar Slaviček, dr.sc. Ivan Hrabar, and prof. Zdenko Kovačić have authored a paper in the "Robotics" journal. Titled "Generating a Dataset for Semantic Segmentation of Vine Trunks in Vineyards Using Semi-Supervised Learning and Object Detection," their research presents novel methods for crafting datasets specifically aimed at the semantic segmentation of vine trunks within vineyards. For further information, access the full article.
Prof. Stjepan Bogdan and Marko Križmaničić are slated to participate in a review meeting for the Watchplant project at the University of Konstanz from February 26th to 28th, 2024. This initiative aims to innovate plant monitoring and research. Stay tuned for updates on the meeting's outcomes.
Today marks Day 1 of the Learning Expedition in Seville! The agenda includes an insightful Andalusia Aerospace Cluster presentation at CTA facilities, followed by visits to Industry Puerto de Santa María and TITANIA at Tecnobahia, El Puerto de Santa María.
We're thrilled to have our adventurers, Dario Stuhne and Dean Martinović, on the ground to provide us with firsthand impressions from the expedition.
Renowned keynote speaker Martin Saska was featured at the 2nd International Conference on Unmanned Vehicle Systems (UVS-Oman 2024), organized by the College of Engineering at Sultan Qaboos University (SQU). He delivered a lecture titled "Towards Agile Swarms of UAVs in the Wild" and conducted a workshop on Tightly Cooperating Aerial Vehiclesin Real-world Environment. Throughout both engagements, Martin actively promoted Open Lab initiative. The conference took place from February 12th to 14th.
We are delighted to announce that Antonella Barišić Kulaš will be presenting the paper titled "Bio-inspired Visual Relative Localization for Large Swarms of UAVs" at the 2024 IEEE International Conference on Robotics and Automation (ICRA). The conference is scheduled to take place from May 13-17, 2024, in Yokohama, Japan.
This paper, authored by Martin Krížek, Matouš Vrba, Antonella Barišić Kulaš, Stjepan Bogdan, and Martin Saska, introduces a pioneering approach to visual perception for relative localization within extensive UAV swarms. The research draws inspiration from the perceptual strategies utilized by schools of sardines, swarms of bees, and other large decentralized groups of animals.
This work represents a collaborative effort with the Czech Technical University in Prague, showcasing innovative strides in UAV swarm technology and bio-inspired robotics.
Dario Stuhne and Dr.-Ing. Dean Martinović, members of LARICS, will attend the Learning Expedition in Seville from February 22nd to 23rd, 2024. This expedition invites European SMEs from textile, construction, and advanced manufacturing sectors to explore the Andalusian Aerospace Sector through the AEROSTREAM and IN-TRANSIT projects. AEROSTREAM's co-organization of the event aims to strengthen cooperation with partners and improve European SMEs' access to potential collaborations. Additionally, AEROSTREAM partners will visit Fundación Andaluza para el Desarrollo Aeroespacial CATEC, one of Europe's premier aerospace technology centers, and learn about various companies and the Andalucía Aerospace Cluster.
LARICS members prof. Zdenko Kovačić and Antonella Barišić Kulaš visited the IFAM Fair 2024 in Slovenia, the premier B2B Trade Fair for automation and mechatronics in the CEE region. The fair, focusing on key technologies like sensor and measurement technologies, aims to meet the needs of professional visitors.
We are thrilled to announce that Ana Milas will be presenting the paper titled "Autonomous Exploration of Unknown 3D Environments Using a Frontier-Based Collector Strategy" at the 2024 IEEE International Conference on Robotics and Automation (ICRA). The conference is scheduled to take place from May 13-17, 2024, in Yokohama, Japan. This paper represents a collaboration between members of the Fundación Andaluza para el Desarrollo Aeroespacial and the Laboratory for Robotics and Intelligent Control Systems (LARICS), including Ivan David Changoluisa Caiza, Marco Montes Grova, Francisco Javier Pérez Grau, and Tamara Petrović.
UNIZG-FER team, composed of LARICS and LABUST laboratories, clinches the top spot at the prestigious MBZIRC competition, securing a grand prize of 2 million dollars. This monumental triumph reflects their unwavering dedication to excellence and innovation. The competition spanned two years and unfolded across various phases. In the end, only 5 finalists remained, spending a month preparing to showcase their accomplishments in Abu Dhabi. Heartiest congratulations to the team on this monumental triumph!
The IEEE Croatia Section and the IFRoS project hosted lectures on:
"Neural Radiance Fields (NeRF): basics, variations, applications" which was presented by Nelli Nyisztor, a Ph.D student and "Transferability in Robotics: transfer, curriculum, and reinforcement learning" which were presented by Dániel Horváth, a Ph.D student on Thursday, January 18.
On Tuesday, January 16, 2024, the first review meeting for the AeroSTREAM project took place, marking a significant milestone in the project's progress. The project is funded under the Horizon Europe sub-programme 'Widening participation and spreading excellence' - European Excellence Initiative. During the session, the consortium presented an overview of all activities conducted within the project to the project officer, Agne Dobranskyte-Niskota, and to the external monitor.
The meeting was successful, and the consortium received valuable feedback from both the project officer and the monitor. It was a pleasure to host everyone in Zagreb and to lay the groundwork for successful future project activities and collaborations.
Robert Milijaš and Goran Vasiljević, representing FER LARICS, showcased their research at the International Conference on Electrical, Control, and Computer Engineering (ICECCE) on December 30-31, 2023. Vasiljević presented two articles: "Control System for an Automated Electric Street Sweeper Cleaning System" and "Hardware-in-the-Loop System of the Autonomous Municipal Cleaning Vehicle". Meanwhile, Milijaš focused on "Towards an Environmentally-friendly Street Sweeping Vehicle with Reduced Water Consumption".
More details about the articles are available here.
On 21st of December LARICS researcher Ivo Vatavuk successfully defended his doctoral dissertation and received a PhD degree in Electrical Engineering. Ivo’s thesis is entitled "Optimal control of a mobile manipulator for spraying and suckering tasks in viticulture". Congratunations Ivo!
On 12th of December LARICS researcher Ivan Hrabar successfully defended his doctoral dissertation and received a PhD degree in Electrical Engineering. ivan’s thesis is entitled "Navigation of an autonomous all-terrain mobile manipulator in semi-structured vineyard environment". Congratunations Ivan!
The Interest Group of Young Professionals and the Laboratory for Robotics and Intelligent Control Systems (LARICS, Aerostream project) hosted a lecture titled "Artificial Intelligence in Aerial Manipulation" by Filip Zorić, MSc.Eng. from the Faculty of Electrical Engineering and Computing, University of Zagreb. The event took place on Monday, December 11, 2023, at 11:00 AM at the Faculty of Engineering, University of Rijeka.
The lecture, conducted in the Croatian language, had a duration of 90 minutes. It was open to all interested parties, with a special invitation extended to undergraduate and graduate students. Additional information about the lecture and the lecturer can be found in the detailed content of the announcement.
Between November 26th and December 3rd, 2023, Marko Križmaničić actively participated in advancing the WatchPlant project during his visit to the University of Konstanz in Germany. Engaging in an intensive workshop, the focus was on pushing the boundaries of hardware and software for hybrid wireless sensor networks, incorporating technologies like Bluetooth, Zigbee, LoRa, SMS, and WiFi. This workshop represents a significant leap forward in the WatchPlant project, underscoring the commitment to international collaboration and driving innovation in the realm of wireless sensor networks.
On November 29, 2023, Antonella Barisic Kulas, researcher and PhD student of Laboratory for Robotics and Intelligent Control Systems (LARICS), delivered an insightful lecture at RIT Croatia. This event was a part of the AeroSTREAM initiative, which aims to foster connections among students and researchers while promoting knowledge sharing and future collaborative opportunities.
FER, the Faculty of Electrical Engineering and Computing, hosted an engaging Open Day on Saturday, November 25, 2023, from 10 am to 4 pm, providing a unique opportunity for high school seniors to explore the diverse fields of study and research offered by the faculty.
During the FER Open Day, visitors enjoyed a variety of activities, including playing Pong with artificial intelligence, witnessing robots cultivate plants in a greenhouse, and participating in a workshop on teaching robots to write. The event also featured a robotics workshop, a closer look at micro- and nano-electronics through a microscope, and a showcase of cutting-edge inventions and technologies in electrical engineering, information and communication technology, and computer science by FER staff and students. Notably, LARICS presented their projects Specularia and WatchPlant, and there was a special workshop tailored for elementary school students.
The 1st Croatian Symposium on Artificial Intelligence, organized by the Croatian Academy of Sciences and Arts, held on November 21st, aimed to bring together the Croatian scientific community in the field of artificial intelligence, along with researchers from other scientific domains. The event facilitated the exchange of information, providing an overview of research activities and diverse applications.
The 28th edition of the PhD Café took place on November 15th at Booksa, where four young researchers, future doctors of science from the field of technical sciences, presented their research. Among them was Filip Zorić and he presented his research titled: Artificial Intelligence in Aerial Manipulation.
The City of Petrinja and the Petrinja Development Agency - PETRA organized a promotion event, November 6th, at the Sports Hall of the "Mate Lovrak" Elementary School in Petrinja. The event showcased the final projects of the first generation of participants from the Drone-IN Center for Innovation and Artificial Intelligence in Petrinja. During the event, the participants were awarded certificates and credentials as remote pilots.
Jaen, Spain - Stjepan Bogdan and Goran Vasiljević recently took part in a demonstration and final review meeting of the Aerial Core project, held at the ATLAS (Air Traffic Laboratory for Advanced Unmanned Systems) center in the province of Jaen, Spain. During the demonstration, various technologies developed throughout the project were showcased with great success. Reviewers expressed high satisfaction with the project's achieved results.
As part of the program activities of the Regional Center of Competence in Sisak, the Robotics and Automation Fair, organized by the Technical School of Sisak, was opened today.
The fair featured 19 exhibitors, including equipment manufacturers and higher education institutions, who showcased the latest achievements in the field of industrial process automation and robotics, vocational training processes, and the modern equipment that enables these advancements.
In addition, a lecture titled "Robots that Walk, Fly, and Drive – Unconventional Robotics at FER" was presented by Assoc. Prof. Matko Orsag from the University of Zagreb, Faculty of Electrical Engineering and Computing. The lecture provided insights into the various types of robots found in the Laboratory for Robotics and Intelligent Control Systems (LARICS), including unmanned aerial vehicles, walking robots, humanoid robots, mobile vehicles, and robotic manipulators used to assist in agriculture and industry. Attendees had the opportunity to learn how these robots operate and discover their diverse applications.
LARICS PhD student Ana Milas published an article ASEP: An Autonomous Semantic Exploration Planner With Object Labeling in scientific journal IEEE Access on 28th of September 2023. You can find more details on this video.
On Thursday, October 19, 2023, the final conference of the Croatian-Swiss Research Program 2017-2023 (CSRP) was held at the Zagreb Innovation Center (ZICER). Professor Stjepan Bogdan, the vice dean of the Faculty of Electrical Engineering and Computing participated at the roundtable discussion on the future and challenges of the Croatian research system.
Topics discussed during the roundtable included the reputation and relevance of Croatian research institutions at the European and international levels, the potential of Croatian researchers to engage in international consortia, the capacity of Croatian institutions to attract and retain foreign scientists, the balance between fundamental and applied research, the importance of social and human sciences versus STEM fields, and the role of the Croatian Foundation for Science in the national system.
Filip Zorić participated at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) held in Detroit, USA from October 1st-5th, 2023.
At the conference, Filip zorić presented an article written in collaboration with the University of Seville, called Performance Comparison of Teleoperation Interfaces for Ultra-lightweight Anthropomorphic Arms, where the authors are: Filip Zorić, Alejandro Suarez, Goran Vasiljević, Matko Orsag, Zdenko Kovačić and Anibal Ollero.
See more details about the article check out this video.
Bruno Marić, PhD, presented a poster titled "Virtual pen: Human-friendly robot systems deployment" at the 16th International Workshop on Human-Friendly Robotics (HFR 2023). The workshop, scheduled for September 20-21, 2023, in Munich and organized by the Technical University of Munich (TUM) and Deutsches Zentrum für Luft- und Raumfahrt (DLR), aims to explore current and future AI and robotic solutions in the context of human-robot interaction.
It focuses on human-centric applications in various settings, including homes, service scenarios, and industrial tasks. The event's goal is to bring together a diverse community of researchers, experts, and industrial partners working on creating safe and meaningful connections between robots and humans. Additionally, HFR 2023 emphasizes promoting innovative applications in human-centric environments and with human collaboration. The workshop also fosters collaboration, idea exchange, and the practical use of existing and emerging solutions in the realm of human-robot interaction and coexistence.
The second edition of AeroSTREAM Summer School was hel from 4th to 6th of July, and here's a glimpse into the action-packed days in Prague!
The core focus? Exploring various robotic realms such as motion planning for decision-making agents, aerial swarm dynamics, and the fusion of multi-sensors for precise localization and navigation.
But that's not all! We had dedicated time for AeroSTREAM activities, including brainstorming sessions on Aerostream research initiatives and seminars about real-world applications tackled within the AeroSTREAM project.
On 12th of July LARICS researcher Marko Car successfully defended his doctoral dissertation and received a PhD degree in Electrical Engineering. Marko’s thesis is entitled "Control system for an unmanned aerial manipulator interacting with the environment based on a generalized model". Member of the PhD commite was prof. Adnan Tahirović a partner form University of Sarajevo and partner on AeroSTREAM project. Congratulations Marko!
We are delighted to share that on Monday, June 26, the students from the inaugural batch of the IFROS Master’s program (2021-2023) presented their master’s thesis projects. The members of the evaluation committee were highly impressed by the projects showcased by our talented students. Their presentations truly highlighted their dedication, effort, and outstanding quality of work. We wholeheartedly congratulate all the students on their remarkable achievements and wish them a future filled with boundless opportunities.
Students Marko Kozlik and Viktor Horvat from LARICS, under the guidance of Prof. Bogdan and Orsag, have been honored with the University's prestigious rector's award on 29th of June, 2023 for their outstanding individual scientific work. Their project, titled "FERbarium - self-sustainable wireless sensor node controlled by mobile application," has garnered attention for its innovative approach.
This project, aimed at developing a wireless sensor node for environmental monitoring in greenhouses and urban environments, is closely linked to the Specularia and WatchPlant initiatives. The groundbreaking work of Kozlik and Horvat not only contributes to scientific advancements but also aligns with real-world applications, emphasizing the importance of their research.
Stay tuned for more updates on their inspiring work and its impact on environmental monitoring.
On 28th of June 2023, WatchPlant meeting was held in Warszawa. LARICS members prof. Stjepan Bogdan and Marko Krizmančić presented the achievements from FER. The plan for the next goals was presented.
LARICS PhD student Marko Križmančić participated at the 2023 International Conference on Information, Communication and Automation Technologies (ICAT) in Sarajevo, where his paper "Decentralized Multi-Robot Formation Control Using Reinforcement Learning. Obradovic, J.; Krizmancic, M.; and Bogdan, S." was presented. In addition to this, Marko gave a talk at the Faculty of Electrical Engineering of the University of Sarajevo, about UNIZ-FER experience in MBZIRC competitions. The talk was very well received by the University of Sarajevo master students and researchers.
Goran Vasiljevic participated in the 10th Aerial Core Consortium Partner Meeting in Prague, Czech Republic on June 21-22, 2023. At the meeting, the current state of the project was presented and further experiments and final demonstrations of the project were agreed upon.
On 14th of June LARICS researcher Antun Ivanović successfully defended his doctoral dissertation and received a PhD degree in Electrical Engineering. Antun’s thesis is entitled "Model based motion planning for manipulation with heterogeneous robotic systems under constraints". Congratulations Antun!
Marko Križmančić, a scientist from the Faculty of Electrical Engineering and Computing at the University of Zagreb, visited Sarajevo and delivered a presentation about LARICS' participation in the International Robotics Challenge in Abu Dhabi (MBZIRC). The presentation was part of the AeroStream project and was intended for his partners from AeroStream1 company and the Faculty of Electrical Engineering in Sarajevo, and it was attended by professors, doctoral candidates, and master's students.
Prof. Dr. Stjepan Bogdan and Marko Križmančić, collaborated on an article presented at the 29th International Conference on Information, Communication, and Automation Technologies (ICAT), held in Sarajevo from June 11 to June 14. The article was presented by Juraj Obradović, a scientist from the Laboratory for Underwater Systems and Technologies (LABUST) at the Faculty of Electrical Engineering and Computing, University of Zagreb. Find more details about the programme.
For the second year in a row, we have organized the UAV Competition at the ICUAS conference. The finals of the competition that was student focused, and offered unique opportunities for students to test and compare their skills with those of their peers worldwide, was held in Warsaw, Poland. With the theme of infrastructure inspection, and involvement of two EU projects (AeroSTREAM through University of Zagreb, METRICS through CATEC), the competition generated similar interest to the first edition. In total, 15 solutions were submitted in the simulation phase, and following the rigorous evaluation of three benchmarks, the committee selected top 5 teams to perform live, during the conference: UMIC (India), Carrot (South Korea), AiRo Lab (Hong Kong), CVAR (Spain), SDCN lab (Canada). ICUAS’23 supported the finalists covering the accommodation, lunch and conference registration expenses. After three days of integration, tests and competition flights, the defending champions, team CVAR from Universidad Politécnica de Madrid, Escuela Técnica Superior Ingenieros Industriales ETSII, Spain (David Perez Saura, Pedro Arias Perez, Miguel Fernandez Cortizas) won the first place.
LARICS PhD student Marijana Peti published an article Decentralized Coordination of Multi-Agent Systems Based on POMDPs and Consensus for Active Perception in scientific journal IEEE Access on 2nd of June 2023.
We are proud to announce that seven doctoral students in total from the LARICS laboratory presented their research at this year's FER PhD Day through a series of inspiring posters. It is interesting to note that our seven posters make up an impressive 17.5 percent of all participants. The doctoral students who exhibited their work: Jurica Goričanec, Ivan Hrabar, Bruno Marić, Lovro Marković, Ana Milas, Juraj Oršulić and Ivo Vatavuk. Congratulations to everyone on the exceptional presentation of their dedicated work.
We especially want to highlight doctoral students Lovro Marković and Ivan Hrabar, whose posters deservedly entered the final selection for the best poster. We are extremely proud to announce that Ivan Hrabar won the award for the best poster, and presented his work during the central part of the PhD Day event.
You can view all the posters at: https://www.fer.unizg.hr/studiji/doktorski_studij/dan_doktorata/dan_doktorata_2023#%23!p_rep_155074!_-220046.
The 24th edition of the PhD Café took place on May 31st at Booksa, where four young researchers, future doctors of science from the field of technical sciences, presented their research. Among them was Ana Milas and she presented her research titled: Discovering the unknown: application of drones in space exploration.
As part of the Erasmus+ project Cogsteps, whose coordinator is FER, a startup education program called From Customers to Product was held. The program was held at the Technische Universität Graz. Dario Stuhne and Ivan Hrabar participated from LARICS, who considered the commercialization potential of the HEKTOR project.
Goran Vasiljević participated in integration and validation experiments at ATLAS 23.-25.5. ((Air Transport Laboratory for Advanced Unmanned Systems), Villacarillo (Jaen) Spain. Various parts of the Aerial Core project were tested, and we also participated in transmission line manipulation experiments.
Renowned experts Stjepan Bogdan from the University of Zagreb Faculty of Electrical Engineering and Computing and Tomislav Radišić from the University of Zagreb Faculty of Transport and Traffic Sciences have been appointed to the Technical Committee on Unmanned Aircraft Systems at the Croatian Standards Institute. The committee's main focus is to establish and coordinate Croatian norms and standards for unmanned aircraft systems, ensuring safe and efficient integration into the country's airspace. Bogdan and Radišić bring their extensive knowledge and experience in UAS operations, safety, and airspace integration, positioning Croatia as a leader in responsible unmanned aviation.
The recent MUZZA Science Week, held from May 19th to 21st at the Zagreb Trade Fair, successfully captivated the general public with its mission to showcase the captivating world of science. With a special focus on engaging children, the event aimed to spark curiosity and demonstrate the beauty of scientific exploration, and inspiring children to learn about science and technology.
Marko Križmančić was visiting Spain from 8th to 11th May 2023, where he participated in setting up air quality sampling experiments for the WatchPlant project. The project partners from CSIC-IRNAS and CSIC-IDAEA placed tomato and ivy plants in three different air quality measuring stations located in Barcelona and Vic. These locations were selected specifically to monitor background pollution in suburban, urban, and high-traffic density areas. In a couple of months, the responses collected from plants in the experiment will be matched with data from air quality stations to create more precise models for future bio-hybrid sensors.
Trieste, Italy - From May 15th to May 19th, robotics enthusiasts gathered for an inspiring training event. Professor Stjepan Bogdan from the University of Zagreb Faculty of Electrical Engineering delivered a captivating lecture on the MARBLE project, while Filip Zorić conducted a tutorial on starting robots in Docker Terminal. Attendees left with valuable knowledge and newfound inspiration.
The Bounding Box Conference in Osijek was an incredible success, thanks to the outstanding organization by Protostar and the strong support of the Aerostream project. With captivating lectures, including one by Professor Bogdan titled Multi agent active perception based on Reinforcement Learning, the event surpassed all expectations. Held at the newly opened Business Centre, attendees engaged in fruitful networking and explored cutting-edge solutions. Relive the excitement at https://bounding-box.ai/ and stay tuned for future innovations!
Dario Stuhne published an article that will be presented at AIM 2023 international conference. The article is an exstension of previously published article Design and Prototyping of Soft Finger AI-Enabled Hand (SofIA).
The HEKTOR project recently reached an important milestone with the completion of the final experiments.
The project focused on developing algorithms for autonomous robotic tasks in agriculture and mariculture, and the focus of the latest experiments was on the autonomous suckering and spraying in vineyards located on meliorated karst terrain.
Meliorated karst, characterized by distinctive limestone and dolomite rocks, presents a major challenge for agricultural activities. The in situ testing phase of the project included a series of rigorous trials to evaluate the effectiveness and efficiency of the developed algorithms.
These tests provided valuable insights into the real-world performance of the autonomous robotic systems and allowed the team to identify potential areas for improvement and optimization.
The two days of great talks, interesting panels, excellent presentation at the company booths, combined with a casual afternoon in Boogaloo flight zone, are behind us. On a small closing ceremony held at the Alumni club at FER, professor Bogdan thanked all involved for being a part and contributing to DroneDays. Until next edition, feel free to check out the photo gallery at the DroneDays website to relive these two awesome days. Thank you all and until next time!
Like last year, we are organizing the UAV Competition at the International Conference on Unmanned Aircraft Systems (ICUAS). The competition is organized through two phases, with the final phase being held alongside the Conference in Warsaw, Poland in June.
This year, the competition is organized by FER, LARICS and CATEC through AeroSTREAM and METRICS projects. Almost 40 teams registered for the first phase of the competition, with 15 teams submitting their solutions. 5 teams qualified for the finals in Warsaw: UMIC from Indian Institute of Technology in Bombay, AIRo Lab (PAIR lab) from the Hong Kong Polytechnic University, Carrot from Chung-Ang University, SDCN lab from York University and CVAR from Polytechnic University of Madrid.
We congratulate all teams on their performance and especially to the top five teams for qualifying to the finals in Poland. See you at ICUAS'23!
LARICS members participated in the Science festival held on 24th-29th of April 2023 at the Technical Museum in Zagreb. LARICS participated in two events. First, within the Robotics@FER group and supported by project AeroSTREAM, Specularia and HEKTOR, a workshop entitled "Aerial robotics for Agriculture" organized by LARICS PhD student Robert Milijaš was held. In the workshop, a brief introduction of UAV possibilities and applications in the agriculture area were presented. Also, the visitors could see UAVs in action and test their piloting skills. Second, a lecture about the EIC Pathfinder project Watchplant, entitled "Why do plants need a smartwatch?" was held by LARICS PhD student Marko Križmančić, who is a researcher at the project. As usual, the event attracted many visitors of all ages and led to interesting discussions. Special thank goes to LARICS bachelor students for helping run the workshop - Anja Bosak, Dorian Erić and Lovro Raguž.
One of our Pepper robots was involved with the Noc knjige at our Faculty, showcasing the robot reading skills and also hosting a pub-like quiz. Noc knjige (Croatian Book Night) is an event organized every year since 2012, marking the World book day and Croatian book day, with the aim of popularisation of reading and promotion of books. Since the 2023 edition of Croatian Book Night was organized with the theme "Do robots dream of electrical books?, it was only logical for our Pepper to participate.
On April 21st 2023, the Central library of FER, lead by Mrs. Branka Marijanovic, organized an event "Book night at FER" that included two talks about artificial intelligence, one from perspective of computer science (held by professor Marko Đurasević from FER) and the other from the more philosophical point of view (held by professor Luka Perušić from Faculty of Humanities and Social Sciences). Our robot Pepper joined the dean, professor Bilas, in opening the event by reading a passage from "2001: A Space Odyssey", was the host of the quiz for the four high-school student teams and closed the event by reading out the laws of robotics proposed by Isaac Asimov.
From 17th to 20th April 2023, at the Faculty of Electrical Engineering and Computing in Zagreb, LARICS organized an integration workshop for the project WatchPlant with project partners from the University of Konstanz and the University of Lübeck, as well as two of our master's students.
During the intense four days of focused work, the project consortium assembled a prototype heterogeneous sensor network consisting of 15 Bluetooth Low Energy, ZigBee, and LoRa devices and tested their reliability, range, power consumption, and ease of use. The workshop was successful and its results pave the way for setting up larger outdoor sensor networks later in the project.
For more information, check out the detailed report here.
Dario Stuhne published an article "Design and Validation of Wireless Drone Docking Station" at ICUAS 2023 international confrerence as an exstension to previously published article Design of a Wireless Drone Recharging Station and a Special Robot End Effector for Installation on a Power Line. The articles are being made as a part of AeroSTREAM and AERIAL CORE projects. The article will be presented at the conference, the work on implementation and system upgrade will be continued.
Marijana Peti attended the International Symposium Underwater technologies 2023 (UT23) from 6th until 9th of March in Tokyo, Japan, University of Tokyo, Institute of Industrial Science. She presented an article in the environmental monitoring section: A Search Strategy and Vessel Detection in Maritime Environment Using Fixed-Wing UAVs, Marijana Peti, Ana Milas, Natko Kraševac, Marko Križmančic, Ivan Lončar, Nikola Miškovic, Stjepan Bogdan, FER, University of Zagreb.
Zdenko Kovačić, Goran Vasiljević, and Antun Ivanović, from the University of Zagreb, Faculty of Electrical Engineering and Computing (UNIZG-FER), made an appearance at the European Robotics Forum (ERF2023) held in Odense, Denmark from March 13th to 16th, 2023. The project AeroSTREAM and LARICS lab were showcased with a stand in the exhibition area.
ERF is Europe's largest event dedicated to robotics, featuring a wide range of topics, such as aerial robotics, artificial intelligence, human-robot interaction, ethics, legal aspects, robotics in education, and entrepreneurship. The forum comprises plenary sessions with keynote speakers, technical workshops, interactive sessions, and an exhibition that displays the latest robotics technologies.
Their participation proved fruitful, resulting in the establishment of new connections within the community and opening up new collaboration opportunities with other researchers and end-users interested in aerial robotics and robotics in general.
Filip Zorić and Goran Vasiljević participated at the integration experiments in Seville and Beas de Segura in Spain from 13th-24th of February.
Matko Orsag attended the WORLD FIRA 2023 conference from 7th-9th of February in Toulouse, France.
Ivan Hrabar held a humanoid robotics workshop on the 8th of February, 2023 at the Bjelovar robotics center
www.roboticki.com at the invitation of the Computer Association of Bjelovar - Bilogora County.
prof. Stjepan Bogdan, vice-dean for research and innovation at FER, recently presented the 3rd edition of DroneDays on HRT’s show! 🎉
Registrations for the third edition of aerial vehicles end-user workshop DroneDays 2023 are ready!
Don’t miss out!
Interesting lectures aerial vehicles end-user workshop, are now open! The third edition of DroneDays will be held 5th of May 2023 at Faculty of Electrical Engineering and Computing.
The registration package includes accreditation with access to all events (lectures, demonstrations in the flying zone, exhibition, coffee breaks, snack zone) and workshop materials. The number of registered participants is limited.
You can buy tickets here!
DroneDays 2023 is back again! The workshop is going to take place in Zagreb (Croatia) on the 4th and 5th of May 2023 at Faculty of Electrical Engineering and Computing. The programme is yet to be confirmed. Please check this webpage regularly for all the updates as well as the programme and registration details.
Dario Stuhne and Ivan Hrabar participated in the international workshop "From MVP to first customers", which was held in the Ljubljana University Incubator from 23rd of January until 5th of February 2023. The workshop was filled with rich programme of lectures and networking. At the workshop the vineyard robot VIV of the HEKTOR project was presented as a potential for commercialization.
On 24th-26th of January 2023, WatchPlant meeting was held in Sttutgart. LARICS members prof. Stjepan Bogdan and Marko Krizmančić presented the achievements from FER. The project received excellent feedback from reviewers and the project officer, thus the team continues with its work. The plan for the next goals was presented.
At the 4th conference on new technologies, robotization and automation in industry and construction CROATIA 4.0 - BRIGHT FUTURE prof. Stjepan Bogdan and Jurica Goričanec presented FER's 'SPIN-OFF' AVYONX AND AUTONOMOUS INSPECTION PROJECT of WIND PLANT WITH UAVS.
On Thursday, December 22, your favorite professors made a real Christmas spectacle! The last evening of the humanitarian advent week at KSET was brightened up by bands with FER professors and staff performing. The bands played a selection of Christmas classics and other hits. After the bands finished their performance, the Disco section of KSET kept up the dance floor atmosphere. We want to thank all of you for making this event so special, and wish you happy holidays from LARICS!
FER professors play at...
1, 2, 3 and play professor!
On Thursday, December 22, don't miss the performance of your favorite professors who have prepared a Christmas spectacle! The last evening of the humanitarian advent week at KSET, from 8 p.m. onwards, will be brightened up by concerts by bands that have professors from FER in their composition, who will perform covers of Christmas classics, after which we will be kept on the dance floor by DJ mixes and the Disco section of KSET.
🤖🤖 The robots are returning to the Cultural Information Center Maskimir!!!! Our Christmas robot party will be held on Tuesday, December 13, 2022 in the large hall of the Center, Švarcova 18, from 12 to 8 p.m.!!! 🤖🤖
On Saturday, November 26, 2022, the Faculty of Electrical Engineering and Computing opened its doors to all those who are interested in scientific research, advanced technologies, and applications of these technologies in everyday life! Members of LARICS were also there showing a series of scientific research and projects. Among them were project WatchPlant, Hektor, and many others. A new project, Aerostream was also intorduced.
We are proud to announce that the winner of this year's "Nikola Tesla" award 2022 for exceptional scientific and professional contribution in the field of robotics and automation is none other than our Zdenko Kovačić. The prize is awarded by the Croatian section of the IEEE.
The HEKTOR project at the International Fair of Agriculture, Agricultural Equipment and Machinery CroAGRO 2022, which will be held from December 1 to 4, 2022, at the Zagreb Fair. The HEKTOR project will be at the Croatian Association of Innovators. On Saturday, December 3, from 11 a.m. to 2 p.m., at the Velesajam, there will be a workshop for winegrowers and winemakers: HEKTOR Robotic system for spraying and removing saplings in vineyards.
Project HEKTOR will be presented at Zagreb VINOcom 2022 (Zagreb International Wine and Culinary Festival). The festival will be held form 27th until 28th of November 2022 in hotel Esplanade Zagreb. At the festival on 27th of November a HEKTOR workshop will be held at 11 h.
Goran Vasiljević and Antonella Barišić attendet the #IEEE SSRR conference in Seville, Spain, where they presented the work of the entire research group of the NATO project MARCUS. The presented paper was one of the four finalists for the best paper award. Goran Vasiljević presented the following article: 3D Model-Based Nondestructive Scanning of Reactor Pressure Vessels with 6DoF Robotic Arms.
At the international meeting 1ST EUROPEAN CONGRESS OF BIOMEDICAL AND VETERINARY ENGINEERING – BIOMEDVETMECH 2022, held from 20-22.10. 2022 in Zagreb, Prof. Z. Kovačić held on 20.10. within the Medical Robotics keynote lecture section entitled “Robotics in Medicine – Projects of Laboratory for Robotics and Intelligent Control Systems (LARICS).” In it, he spoke about the results of research on the ADORA and Radiochirurgia – Rays of Hope projects, as well as internal research on the use of humanoid robots to assist medical personnel in providing care and health care and to assist during the performance of hand physical therapy exercises.
Dario Stuhne, Jelena Vuletić and Filip Zorić attended the International Conference on Smart Systems and Technologies (SST) which was held from 19th – 20th of October in Osijek. Dario Stuhne presented Automated Suckering of Vines with a Mobile Robot and a Torque-controlled Suckering Tool (Hektor), Jelena Vuletić presented Procedural generation of synthetic dataset for robotic applications in sweet pepper cultivation (Specularia). Filip Zorić presented Towards intuitive HMI for UAV control (Aerial Core) for which he was awarded with Best Paper Award.
The Young Professionals Interest Group, the Robotics and Automation Department (RA24) of the Croatian IEEE Section and the Laboratory for Robotics and Intelligent Control Systems (LARICS, Aerostream project) invite you to an interactive lecture:
Run the bot in a Docker container
which will be held by Filip Zorić, mag. ing. from the Faculty of Electrical Engineering and Computing, University of Zagreb, on Thursday, November 3, 2022 at 6:00 p.m. in hall A-211.
The lecture is in Croatian, and the expected duration is 60 minutes. The lecture is open to anyone interested, and we especially invite undergraduate and graduate students. To participate, you need to register using the form. The number of places is limited.
If you want to actively participate in the lecture, please bring your own computer with a charged battery and a Linux operating system.
Read more information about the lecture and the lecturer in the more detailed content of the notification.
The idea of the interactive lecture is to familiarize you with the basic concepts of the Docker system for virtualization. The goal of the lecture is to install Docker and perform all the necessary steps to start a simple robot with ROS2. It is necessary to bring your own computer with a charged battery and a Linux operating system to the lecture.
prof. Stjepan Bogdan held a lecture at AI2FUTURE2022 conference held from 13th –14th of October 2022, Zagreb where he presented ideas and results of od project WATCHPLANT.
On September 22, 2022, a successful kick-off meeting for the AeroSTREAM project was held at the Hotel International in Zagreb. The AeroSTREAM project is a Horizon Europe project coordinated by UNIZG-FER and covers the field of aerial systems for forestry, agriculture and logistics. Project Officer Agne Dobranskyte-Niskota welcomed the attendees and wished us a successful project start. The consortium went through the work planned in work packages and prepared a plan for the first year.
Jelena Vuletić and Matko Orsag participated in the "15th International Workshop on Human-Friendly Robotics" conference in Delft, the Netherlands. Jelena Vuletić presented the paper "Robotic strawberry flower treatment based on deep-learning vision", in which the method for automatic image annotation, A3IA, was presented.
Zdenko Kovačić participated in the RTL Direct show where, at the invitation of editor Mojmira Pastorčić, he gave a short interview on the subject of the public presentation of the humanoid robot Optimus by the world-famous innovator and entrepreneur Elon Musk. , which he claims will be produced and sold in millions for roughly $20,000.
For more information, read the article, while you can watch the interview here.
Mirta Čolić, Iva Hrastnik, Luka Karniš, Andro Katanec, Lovro Pliskovac and Dominik Sekula, mentored by assoc. prof. Matko Orsag and with help of assistant Jelena Vuletić, won the award for their work ‘digitalization system based on photogrammetry: “SimplyDigitize”.
The abstract of their work is available on this link. An example of use case of this system on a collection of stuffed animals can be seen on this link.
Congratulations to the students and their mentors!
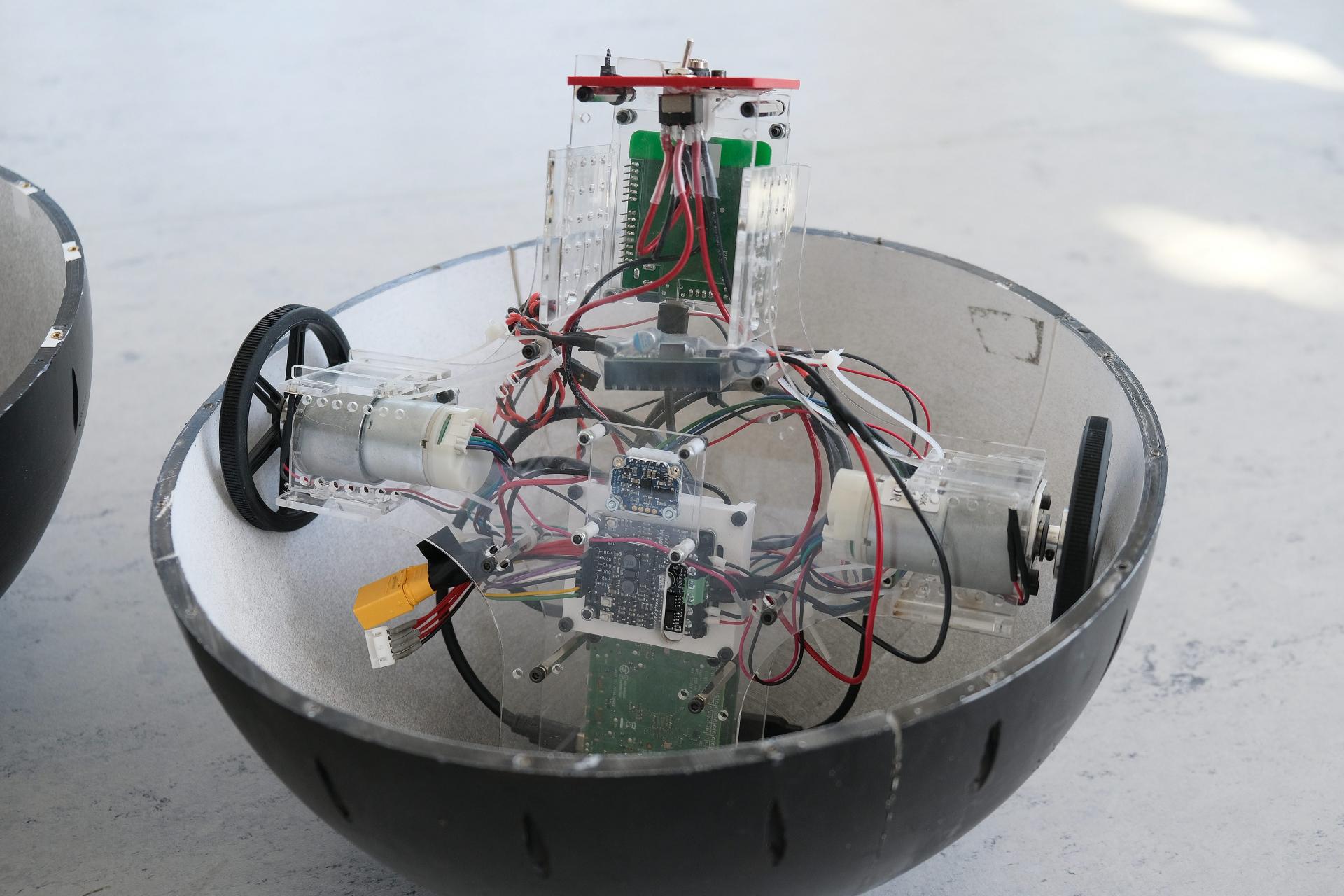
On the 13th of September 2022, LARICS participated in an unusual setting for robotics - a fashion show. The first independent fashion show by Croatian fashion brand Klisab, FALLFALL6, featured three spherical robots developed in collaboration between LARICS from FER at the University of Zagreb, TU Delft in the Netherlands, and Croatian artist Hrvoje Hiršl. To find out more about the project, check out our earlier post here, and for pictures and more information about the show and Klisab, visit their Facebook page. A short video of the show is available on YouTube.
Author of photograph: Karla Juric / @ninetofivestudio
ACM International Conference on Information Technology for Social Good (GoodIT) 2022 was held on September 07th - 09th in Limassol, Cyprus. LARICS researcher Marko Križmančić attended the conference and presented the paper "Distributed Connectivity Control in Bio-Hybrid Wireless Sensor Networks" (Marko Križmančić, Tim-Lucas Rabbel, Eduard Buss, Mostafa Wahby, Heiko Hamann, Stjepan Bogdan).
We are proud to announce that another paper, "PhytoNodes for Environmental Monitoring: Stimulus Classification based on Natural Plant Signals in an Interactive Energy-efficient Bio-hybrid System" (Eduard Buss, Tim-Lucas Rabbel, Viktor Horvat, Marko Krizmancic, Stjepan Bogdan, Mostafa Wahby, Heiko Hamann), presented by Eduard Buss and co-authored by LARICS members won the best paper award sponsored by MDPI “Sensors”. Congratulations!
LARICS PhD student Dario Stuhne published an article Design of a Wireless Drone Recharging Station and a Special Robot End Effector for Installation on a Power Line in scientific journal IEEE Access on 29th of August 2022.
On 11th of August 2022, the local newspaper Jutarnji list featured a story about the project SubCULTron from Laboratory for Underwater Systems and Technologies (LABUST) and new project HEKTOR. Project subCULTron was a large Obzor2020 project worth almost four million euros led by prof. Nikola Mišković. The goal of the project was to create a flock of underwater robots composed of different platforms. It also brought together researchers from the University of Graz, the Free University of Brussels, the Swiss company Cybertronica Research, a non-profit research organization from France, and the Scuola Superiore Sant'Anna University, the CORILA consortium from Italy. LABUST collaborated on the project with another FER laboratory, LARICS, which specializes in robotics and intelligent systems and is led by Stjepan Bogdan. Through the project, in Croatia alone, around 15 underwater robot experts have been created. The project is undergoing the process of commercialization.
The full article is available here, while the pdf version can be downloaded here (in Croatian).
Four LARICS researchers Jurica Goričanec, Lovro Marković Marijana Peti and Filip Zorić attended the AeroStream Summer School 2022 on multi robot systems held from 1st to 4th of August at Czech Technical University in Prague, Czech Republic. A few lectures were from top academic researchers in the field of robotics, such as Anibal Ollero, Konstantinos Alexis, Martin Saska, etc. Each day a rich networking program was provided after the lectures in the form of social dinners and sightseeing trips.
As a part of project Caliper, an interview was published, with LARICS Lab assistant professor Ph.D. Tamara Petrović. The goal of the interview is to promote horizontal principles, equality, and representation of women scientists at the university and their involvement in projects.
LARICS members Stjepan Bogdan and Marko Krizmančić participated at the 4th WatchPlant General assembly held from 13th-14th of July 2022 in Stockholm, Sweden, where all partners presented activities carried out during the last six months. The review meeting of the project WatchPlant was held on the 15th of July 2022 in Stockholm, Sweden. At the meeting activities from the beginning of the project were presented to the representatives of the European commission. The project received excellent feedback from reviewers and the project officer, thus the team continues with its work.
On 14th of July LARICS team researcher Dario Stuhne attended the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2022) conference that was held from 11th-15th of July in hybrid form in Sapporo, Hokkaido, Japan. The article "Design and Prototyping of Soft Finger AI-enabled Hand (SofIA)" was presented as a part of Specularia project.
Filip Zoric, Stjepan Bogdan and Goran Vasiljevic participated at 2nd review meeting of the Aerial Core project that was held in Lausanne, Switzerland and which was held during week 4th to 8th July 2022. The consortium presented the results of AERIAL-CORE's second period, performing demonstrations at EPFL, as well as streaming demonstrations from US, CTU, UT and Donecle.
On July 2nd LARICS researchers Jelena Vuletić, Marijana Peti and Dario Stuhne attended the Innovation Day conference THINK BIG. They demonstrated manipulation of objects of irregular shapes with soft robotic hand (SOFIA) from project SPECULARIA and a smart biohybrid system for controlling and monitoring plants as a part of WATCH PLANT project.
At the conference 20 international and Croatian faculties and companies from the tech industry had an opportunity to present their innovations and projects to students from all over Croatia. The conference was held at Alpha Centauri campus organized by Infobip and STEMI as a part of “Škola budućnosti” project.
More about the project “Škola budućnosti” you can find here.
Read more news about the event in other media:
https://www.rtl.hr/vijesti/hrvatska/spoj-tehnologije-i-obrazovanja-izgleda-pun-je-pogodak-na-danima-inovacija-najvise-su-uzivali-najmladi-40b0ee0c-fa35-11ec-8a0c-8eb0c9ac1191
https://www.24sata.hr/news/dan-inovacija-klinci-iz-cijele-hrvatske-zabavljali-se-uz-ai-robotiku-virtualnu-stvarnost-845957
https://www.vecernji.hr/techsci/zelimo-kod-djece-potaknuti-think-big-mindset-i-motivirati-ih-da-kreiraju-bolju-buducnost-1599309
https://www.istra24.hr/it-tech/dan-inovacija-u-infobipovom-kampusu-spojio-tehnolosku-zajednicu-s-ucenicima-i-uciteljima-iz-cijele-hrvatske
https://www.netokracija.com/dan-inovacija-u-infobipovom-kampusu-196510
https://www.bug.hr/obrazovanje/dan-inovacija-spojio-tehnolosku-zajednicu-s-ucenicima-i-uciteljima-iz-cijele-28050
https://www.poslovni.hr/sci-tech/nasi-ucenici-u-par-mjeseci-izradili-chatbot-pa-to-se-uci-godinama-4344017
https://www.srednja.hr/novosti/tehnologije-buducnosti-u-skolama-djeca-ce-u-svojim-ucionicama-napraviti-pametne-vrtove/
On 28th of June 2022 professor Stjepan Bogdan presented Autonomous inspection of wind turbines by unmanned UAV as a part of the workshop Application of Robotics in Sustainability and Environmental Aspects held at the European Robotics Forum (ERF2022).
The forum was held in Rotterdam, Netherlands from 28th-30th of June 2022. It is one of the most influential events for the robotics and artificial intelligence community in Europe. This year's theme was Sustainability, where high level speakers from industry, knowledge institutes and government shared their vision on the various sustainability topics.
In summer semester of the academic year 2021/2022 students Marija Piliškić, Denis Đurašinović, Filip Pušnik, Josip Ante Kozulić and Filip Karaj participated in the ARIAC competition organized by the National Institute of Standards and Technology (NIST). The focus of the competition is testing the agility of industrial robot systems, with the goal of enabling industrial robots to be more productive and more autonomous. In Gazebo simulator the infrastructure for the production of ventilators was constructed, and two robot arms UR10 which autonomously did given tasks of kitting and assembly. After solving kinematics and elementary moving of robots, the team implemented a system which solves agility challenges like flipped part, faulty product, high-priority orders, human obstacles, and what to do if sensors are faulty.
Various teams from Chinese Academy of Sciences, universities from USA, laboratories from Sri Lanka and South America participated in the competition, and our students successfully passed the first part of the competition and qualified for the finals. In the final, they won a high 6th place.
This year's international ICUAS conference on Unmanned Aircraft systems was held in Dubrovnik from 21st until 24th of June 2022. The main theme of the conference had two aspects: aerial robotics and navigation, and control of manned-unmanned systems. In addition to excellent organization and a handful of content, this year's conference was the first time a student UAV competition was held. One of the organizers of the conference was LARICS (Laboratory for robotics and intelligent control systems) lab.
The conference was fully sponsored by the ICUAS Association, a non-profit organization. The platinum sponsor was the Technical Innovation institute. Technical co-sponsors were the IEEE Control Systems Society, IEEE Robotics and Automation Society, and IEEE, Mediterranean Control Association. Sponsors of the UAV competition were Croatia Control Ltd. (CCL)., F4F Fly4Future, Info-kod, special sponsors: Army Research Office, academic sponsors: University of Denver, the University of South-Eastern Norway and University of Zagreb Faculty of Electrical Engineering and Computing. In total 292 participants took part in the conference, of which 233 were live, including 5 keynote speakers and 16 volunteers, 63 students and 121 full-time researchers, and 59 in virtual form.
The excellent atmosphere at the conference can be seen in our photo gallery.
Three members of the LARICS lab Ana Batinovic, Antun Ivanović, Lovro Marković and Goran Vasiljević attended the international ICUAS conference on Unmanned Aircraft systems that was held in Dubrovnik from 21st until 24th of June 2022. The main theme of the conference had two aspects: aerial robotics and navigation, and control of manned-unmanned systems.
Ana Batinovic presented "Path Planning with Potential Field-Based Obstacle Avoidance in a 3D Environment by an Unmanned Aerial Vehicle".
Antun Ivanović presented "Render-in-the-loop Aerial Robotics Simulator: Case Study on Yield Estimation in Indoor Agriculture".
Lovro Marković presented "Error State Extended Kalman Filter Multi-Sensor Fusion for Unmanned Aerial Vehicle Localization in GPS and Magnetometer Denied Indoor Environments".
Goran Vasiljevic presented "Validation of Two-Wire Power Line UAV Localization Based on the Magnetic Field Strengt".
As part of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), LARICS team organized Aerial Core workshop named “Aerial Core – boosting the adoption of aerial robotics in real-world applications”. The workshop was attended by more than 20 participants, including representatives from electric power companies from Croatia, Slovenia and Bosnia and Hercegovina.
Goran Vasiljevic visited Spain from 8th to 16th June 2022 where he participated at integration of Main Local-Manipulation Platform (MLMP), developed within the Aerial Core project. MLMP consists of end-effector for installation of recharging station developed by LARICS, robotic arm developed by CREATE and aerial platform developed by CATEC. After successful indoor experiments at CATEC in Seville, the experiments continued outdoor in Atlas Tactical Center at Beas de Segura.
LARICS researchers Jelena Vuletić and Marijana Peti attended the 17th Intelligent Autonomous systems (IAS-17) conference held from 13th-16th of June in Zagreb, Croatia.
Jelena Vuletić presented an article Towards Synthetic Data: Dealing with the Texture-Bias in Sim2real Learning.
Marijana Peti presented Multi-agent Coordination based on POMDPs and Consensus for Active Perception.

LARICS researchers Antonella Barisic and Ana Batinovic attended 2022 ICRA - International Conference on Robotics and Automation in Philadelphia, USA. The largest in-person robotics conference was held May 23-27 at the Pennsylvania Convention Center.
Antonella Barisic presented the paper “Sim2Air - Synthetic Aerial Dataset for UAV Monitoring” (A. Barisic, F. Petric, S. Bogdan).
Ana Batinovic presented the paper “A Shadowcasting-Based Next-Best-View Planner for Autonomous 3D Exploration” (A. Batinovic, A. Ivanovic, T. Petrovic, S. Bogdan).
The presentations were followed by a poster session. Our researchers also participated in the "RAS Lunch with Leaders” and “Women in Engineering" events.
The papers can be found on the Publications page and the video materials are available on our Youtube channel.


Last week, on Tuesday, 24th of May 2022, we had a final review meeting for the AeRoTwin project, where we reported to the project officer Mr. Antonio Scarafino and the external reviewer Mrs. Jolanta Mallon on all the activities done within the project. The overall assessment of the project was very positive, and both the project officer and the external reviewer gave us valuable feedback on what could be done to better disseminate and report the project results.
As this is the last official event for the project, we would like to thank our project partners Aerial Robotics Lab from the Imperial College London, Technological Corporation of Andalusia - CTA and Robotics, Vision and Control Group from the University of Seville for their great efforts in making the AeRoTwin project a real success story. It has been a pleasure working with you and we look forward to new such opportunities in the future!
Professor Stjepan Bogdan held the main lecture about Unmanned Aerial System for Inspection and Maintenance of Industrial and Civil Structure a the Aerial and Space Robotics workshop held on the 1st of June at the University of New Mexico in Albuquerque, New Mexico, USA. The workshop was organized by AFRL-UNM Agile Manufacturing (AgMan) Lab. A concise summary of the lecture can be found here.
On 26th of May 2022, the local newspaper Jutarnji list featured a story about the art installation called “Is this life?”. Croatian artist Hrvoje Hiršl, who had conceived the idea behind the installation and is the project initiator, has been closely collaborating with the University of TU Delft in Netherlands and the LARICS lab from FER at the University of Zagreb. The Universities provided technical and engineering support for implementing the artistic ideas envisioned in the project. LARICS member Marko Krizmančić oversaw the development and control of a spherical robot. Marko applied the expertise from his previous work on spherical robots for which he was awarded a Rector’s award together with Antonella Barišić. The team from LARICS was led by assistant professor Tamara Petrović Ph.D.
The full article is available here, while the pdf version can be downloaded here (in Croatian).
*Author of photographs: Goran Mehkek/Cropix

At the 13th international fair in agriculture, food industry and agricultural mechanization AGRO ARCA 2022, two FERs innovations won the highest prizes.
The Autonomous catamaran for aquaculture secured the highest award “Grand Prix” for the authors Nadir Kapetanović, mag. ing., doc. dr. sc. Đula Nađa, Nikica Kokir, mag. ing., Martin Oreč, mag. ing., Kristijan Krčmar, mag. ing. i prof. dr. sc. Nikola Mišković.
Heterogeneous robotic system, whose authors are Ivo Vatavuk, mag. ing., Marko Cukon, Dario Stuhne, mag. ing., Ivan Hrabar, mag. ing., Jurica Goričanec, mag. ing. i prof. dr. sc. Zdenko Kovačić, was awarded with the Golden medal.
The president of Croatian community of innovators prof. dr. sc. Miljenko Šimpraga, in his speech emphasized the importance of innovations in agriculture as well as the significance of collaboration with the academic community.
The 13th international fair in agriculture, food industry and agricultural mechanization AGRO ARCA 2022 took place from 13th-15th of May 2022. The fair was organized by Croatian community of innovators and city of Prelog. On the fair participated 130 presenters from 11 countries. In total, 16 gold, 18 silver and 21 bronze medals were divided into categories of junior and senior innovators.
Laboratory for robotics and intelligent control systems (LARICS) was featured in the student papers Global. LARICS is the first official experimental laboratory at the FER, established in 2011. The team consists of 24 members, including 4 professors, 4 postdoctoral researchers and 16 Ph.D. candidates, led by Professor Zdenko Kovačić.
Discover how they inspire students with a variety of different experiments and projects, and how the application of their solutions is changing the industry in the article “FER-ovi vizionari motiviraju studente i mijenaju svijet.”
After two challenging COVID years, the annual Croatian Science Festival, an event aiming to bring science closer to the general public, finally took place live and in all its glory from 2nd to 7th May 2022. The main theme of this year's festival was celebrating and learning everything about life. Topics ranged from its definition to its preservation, from molecular biology, chemistry and psychology to advanced technologies and beyond. As our lives are quickly becoming unimaginable without robots, LARICS also participated as part of the robotics@fer.hr brand in collaboration with LABUST and LAMOR.
Jelena Vuletić, Marijana Peti, Dario Stuhne, Marko Križmančić, Matko Orsag and Stjepan Bogdan prepared an interactive exhibition to showcase two fascinating projects that aim to improve life through smart agriculture and better environmental monitoring: Specularia and WatchPlant. Marko also gave a presentation on the WatchPlant project, including its mission, concept, and current technological advances.
More photos from the festival can be found in the gallery.
From 15th to 20th May 2022 Filip Zoric and Goran Vasiljevic visited EPFL in Switzerland, where they participated in integration activities of Aerial Core project. Human machine interface developed by LARICS was successfully integrated with fixed wing-rotary wing UAV developed by EPFL.
We are pleased to announce that our Professor Stjepan Bogdan has been elected as the new FER vice-dean for Research and Innovation. His mandate will start in October this year.
We wish him the best of luck in his new role! :D
https://www.fer.unizg.hr/novosti?@=2vntn
April 12, 2022 - Natalia Ivanjko, Katarina Mužina, Ana Novačić, and Marsela Polić are this year's scholarship holders of the National Scholarship Program "For Women in Science" organized by L’Oréal Adria and the Croatian Commission for UNESCO at the Ministry of Culture and Media.
The scholarship program has been running in Croatia for sixteen years, and by decision of leading Croatian scientists, four scholarships in the amount of 5,000 euros are awarded to the four best Croatian scientists under 35 from the field of natural sciences, including interdisciplinary fields, which are in the final year of their Ph.D. studies.
Congratulations Marsela!
More info on the link: https://min-kulture.gov.hr/vijesti-8/svecano-dodijeljene-stipendije-nacionalnog-programa-stipendiranja-za-zene-u-znanosti/22187
On March 11, 2022 LARICS researcher Marsela Polić successfully defended her doctoral dissertation and received a PhD degree in Electrical Engineering. Marsela’s thesis is entitled “Soft robotic manipulation in agrotechnical procedures based on machine and deep learning”.
Antun Ivanović and Lovro Marković (UNIZG FER) visited the Swiss Federal Laboratories for Materials Science and Technology (EMPA) for a week in February 2022. While at the facilities, they worked closely with Prof. Mirko Kovac (ICL), EMPA researchers David Häusermann, Fabian Wiesemüller, and Cedric Portmann, and ICL researchers Bahadir Kocer, Lachlan Orr, and Oscar Pang.
They have continued the collaboration established by Bahadir Kocer's visit to UNIZG FER in February 2020. The team is collaborating on the development of an aerial robotics team for autonomous construction. They are developing planning and control algorithms and exploring new materials and adhesives to enable efficient and robust autonomous construction with a team of drones.
During their stay, they have been working on integrating aerial systems from the two groups and preparing for ICL's upcoming visit to UNIZG FER for further experimental verification in preparation for a joint publication.
LARICS has participated at IFAM 2022, B2B Trade fair Robotics in Ljubljana 15.02.-17.02.22. which is the only event in Slovenia and the CEE region that dedicates to robotics and unmanned systems. Robotics is tailor-made for exhibitors and gives them a platform for presenting their range of robot technologies in both industrial and service robot sectors. Prof. Zdenko Kovačić has come with its team, researchers Ivan Hrabar, mag.ing. and Ivo Vatavuk, mag.ing. and project manager Vlatka Kovačević. LARICS had one of the most visited booths. It was very attractive with a mobile manipulator which was „spraying the vineyard“ and there was an automated guided vehicle, forklift the product of spin-off company Romb Technologies. The automated guided forklift is produced in collaboration with the company VAR d.o.o.
More photos from the fair are available in the gallery.
During Staff Exchange 2, Research Plan, the LARICS team visited partner CTA and US facilities. LARICS Project Manager Vlatka Kovačević met with the Project partner CTA (Technological Corporation of Andalusia) Head of Aerospace Sector Silvia de los Santos and Consultant Marta Marcias and Communication Department Officers Marisol Castro Rey and Natalia Gutierrez Roa.
The goal of this short-term visit was to provide UNIZG-FER project management staff with direct insight into administrative processes in CTA that are related to innovation management and technology transfer. Vlatka has also with Silvia and LARICS Team (Robert Milijaš and Marko Križmančić) visited CATEC (Advanced Center for Aerospace Technologies).
The main outcome of this trip was the enhancement of the reputation, attractiveness, and networking channels of LARICS and raising the profile of its staff thanks to knowledge exchange (best practices, lessons learned).
In the last series of visits in the AeroTwin staff exchange program, LARICS PhD students Marko Križmančić and Robert Milijaš spent three weeks at the University of Seville (USE), Spain from January 15 to February 6. They were working at the Department for Systems and Automatic Engineering under the supervision of Professor José Ramiro Martinez de Dios. Marko worked on designing a new mission planning algorithm for multi-robot systems with the help of USE professor Ivan Maza, while Robert compared the SLAM algorithms and hardware used by the GRVC group at USE to the approaches used in LARICS. During the exchange, several fruitful meetings were held which resulted in plans for future scientific publications.
On February 7, 2022 LARICS researcher Barbara Arbanas Ferreira successfully defended her doctoral dissertation and received a Doctor of Science degree in Electrical Engineering. Barbara’s thesis was entitled “Decentralized mission planning for heterogeneous robotic teams based on hierarchical task representation”.
The thesis was co-supervised by Prof. Stjepan Bogdan (UNIZG FER) and Prof. José Ramiro Martinez de Dios (USE).
The Advent fever did not bypass the robots and drones that occupied the Maksimir Center for Culture and Information at Švarcova 18 on Wednesday, December 22, from 1 pm to 8 pm, and served visitors hot drinks and Christmas treats!
Our lab members introduced visitors to robots Franka, Pepper, Kinova, and Schunk in the Advent house in front of the Center who rolled up their sleeves to warm the visitors in these cold days and brighten the upcoming holidays.
Robots prepared and served hot drinks and Christmas treats, and at the same time in front of the Center, there were presentations of robots intended for primary and secondary school students where they learned firsthand how robots can communicate with plants and learn how to fly drones.
Pupils could also drive robots and make a 2D map or find out how artificial intelligence can warn us in a cheap and environmentally friendly way about the quality of air, soil, and water in our environment. They also learned how robots and plants communicate with each other and how a 3D model of a building model can be made with a drone.
Four parallel workshops were conducted during the entire day: LIDAR workshop, WatchPlant workshop, ASAP/ENCORE workshop, HEKTOR workshop.
More photos from the event are available in the gallery.
The LARICS members Stjepan Bogdan and Marko Križmančić participated in the 3th WatchPlant General Assembly, which took place from 13th to 14th December, 2021, in Seville. During the meeting, the LARICS team presented results of the project activities that have been carried out in our laboratory during the last six months.
The LARICS members Zdenko Kovačić, Stjepan Bogdan and Goran Vasiljević participated in the 5th Aerial Core General Meeting, which took place from 9th to 10th November, 2021, in Zurich. During the meeting, the LARICS team presented project activities that have been carried out in our laboratory during the last six months.
As a part of "Introduction to the Project Management" seminar, organized by Bicro BIOCentar, Zagreb, on October 26, 2021, prof. Bogdan presented LARICS experience in the scientific projects management. Some tips and tricks in a project proposal writing has been shared with the audience as well.
As part of the national InfoDay on Horizon Europe Widening program, that was held on-line on October 28, 2021, prof. Bogdan presented the H2020 AeroTwin project, as an example of a very successful implementation of the project within the widening program. During the presentation prof. Bogdan shared with the participants his experiences in coordinating the twinning project and writing proposals.
Prof. Stjepan Bogdan attended on October 28, 2021, 3rd Conference on New Technologies, Robotization and Automatization in Industry and Buildings - Hrvatska 4.0 organised by Energetika Marketing. The conference, that was related to the social and economic changes that are faster and greater than ever due to the implementation of new technologies and solutions, was held in Zagreb. Prof. Bogdan has been invited to presented H2020 project Watchplant.
Trend and Innovation Network Dialogue Meeting - Automation & Robotics workshop was held on Thursday, October 7, 2021. On that occasion, Prof. Zdenko Kovačić held a presentation on "Review of research in the Laboratory for Robotics and Intelligent Control Systems", and then participated in the round table.
The workshop was organized by the Croatian Agency for SMEs, Innovation and Investments (HAMAG-BICRO), as part of the project "Central Europe Upstreaming for Policy Excellence in Advanced Manufacturing & Industry 4.0 towards 2030 - CEUP2030".
Prof. Zdenko Kovačić attended on October 6, 2021 a conference "Robotics - From Workshop to Market" organised by the Embassy of Italy. The conference was related to the event "Industry Challenges 4.0: Research, Innovation and New Technologies as Tools to Increase Business Competitiveness", held in April last year in Zagreb. Prof. Kovačić participated as a member of a round table.
The conference was held at the Faculty of Mechanical Engineering and Naval Architecture (FSB) of the University of Zagreb and focused on three important topics: the use of robotics and advanced automation in the manufacturing industry and related services; the impact of training systems and research activities on innovation and entrepreneurship; as well as promoting a support and guidance framework for researchers, innovators and companies introducing advanced technologies.
Project partners finally gathered for the 2nd edition of DroneDays 2021 that took place in Biograd na Moru, Croatia. The aerial robotics workshop was held on the 4th and 5th of October, organized by LARICS team. Each partner participated by giving lectures and presenting their work through tutorials and hands-on implementing project activities.
Expert lectures were given by:
- Prof. Mirko Kovac (ICL) on Multi-modal Aerial Robotics for Environmental Sensing and Construction
- Prof. José Ramiro Martines de Dios (USE) on Heterogenous Aerial Robot Cooperation for Inspection and Maintenance
Tutorials and hands-on were given by:
- Silvia de los Santos (CTA) on Technology Transfer Actions and Key aspects for the creation of a successful spin-off
- André Farinha, Constança Rosas and Mirko Kovac (ICL) on The intricacies of looking underwater with a drone – A dual agent system for aerial and underwater operations
- Ashutosh Choubey (ICL) on Commercialisation of university based R&D projects
- Julio L. Paneque and Raúl Tapia (USE) on Heterogeneous Robot Cooperation
The event was successful with 90 registered participants, 16 lectures, 6 demonstration flights, and 200 visitors of the exhibition area where 7 companies presented their products and services.
Photos of the event are available in the gallery of the DroneDays official website.
At this year’s edition of MIPRO 2021 – International Convention on Information, Communication and Electronic Technology, Prof. Zdenko Kovačić presented the paper “Collecting information for biomass estimation in mariculture with a heterogeneous robotic system” (Rezo, M.; Čagalj K. M.; Kovačić, Z.).
HEKTOR’s researcher Ivan Hrabar presented the paper “Towards Autonomous Navigation of a Mobile Manipulator in a Steep Slope Vineyard” (Hrabar, I.; Goričanec, J.; Kovačić, Z.).
The conference was held in hybrid form from September 27 to October 1, with live sessions in Opatija, Croatia.
On Friday, 1 October 2021, a group of eight upper-grade students from the Elementary School Eugen Kvaternik in Velika Gorica visited the LARICS lab accompanied by their informatics teacher Dalija Kager.
The students had the opportunity to see LARICS’ labs, 3D printers in action, and various robotic equipment such as the Schunk robotic arm currently used for installing power line separators in the AERIAL-CORE project.
The main reason for their visit, however, was to learn about how we can measure the well-being of plants and use that information to model our surroundings – a goal we are actively pursuing as a part of the WATCHPLANT project. The students learned about various types of sensors we use for that purpose and got to observe the changes in measured values in real time as they interacted with the plants. They also helped us to water the plants properly using a soil humidity sensor. The children and even their teacher had a lot of interesting questions about the project and our lab, and they were excited to share their own experience with microcontrollers and programming with us.
Check out some photos from the visit in the Gallery.
At this year's edition of the 29th International Conference on Software, Communications and Computer Networks - SoftCom, Ivan Hrabar presented the paper Towards Supervised Robot-assisted Physical Therapy after Hand Fractures (Hrabar, I.; Čelan, B., Matić, D., Jerković, N., Kovačić, Z.). The conference was held in Hvar, Croatia, September 23-25 2021, co-organized by the University of Split, FESB and Croatian Communications and Information Society (CCIS), and technically co-sponsored by the IEEE Communications Society.
On 23 September 2021, the TV show “Prometej” aired on Croatian National Television (HRT) showing several interesting reports of scientific news in Croatia, including a report about the WATCHPLANT project. LARICS members prof. Stjepan Bogdan, Dean Martinović, Ph.D., Marijana Peti, and Marko Križmančić presented the goals of the project, its importance for the general public, and the current progress of the research. They also talked about the most interesting parts of the project, such as the development of sensors, establishing a communication network between devices, and the novel idea of extracting energy from plants’ sap flow.
The whole show is available to registered users on the HRTi platform, while the WATCHPLANT report can be seen on LARICS YouTube channel. The show is in Croatian.
Since LARICS team is constantly growing, so is the need for more space. Last weeek, the construction of a new facililty was finalized. The new offices are now detached to the testing ground. Wishing the LARICS team a lot of experiments and reserach results!

2021 IEEE 17th International Conference on Automation Science and Engineering (CASE) was held on August 23-27, 2021 in Lyon, France. LARICS members Assoc. Prof. Matko Orsag, and PhD students Marsela Polic and Bruno Maric have attended the conference. Bruno Maric presented the paper:
Polic, M., Maric, B. and Orsag, M., 2021, August. Soft robotics approach to autonomous plastering. In 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE) (pp. 482-487). IEEE.
LARICS members Robert Milijas and Jurica Goricanec attended ICUAS 2021 that took place in Athens, Greece from 15 until 18 June, 2021.
Robert presented the paper A Comparison of LiDAR-Based SLAM Systems for Control of Unmanned Aerial Vehicles and Jurica Civil infrastructure data acquisition in urban environments based on multi-UAV mission. Both papers were results of research and activities done within LARICS projects ENCORE, ASAP and AEROTWIN.
.jpeg)
 (1)-min.jpg)
16th International Conference on Telecommunications (ConTEL) was held on June 30 - July 2, 2021 in Zagreb, Croatia. LARICS members have presented the following papers at the conference:
Goričanec, J., Kapetanović, N., Vatavuk, I., Hrabar, I., Vasiljević, G., Gledec, G., Stuhne, D., Bogdan, S., Orsag, M., Petrović, T. and Mišković, N., 2021, June. Heterogeneous autonomous robotic system in viticulture and mariculture-project overview. In 2021 16th International Conference on Telecommunications (ConTEL) (pp. 181-188). IEEE.
Lešić, V., Novak, H., Ratković, M., Zovko, M., Lemić, D., Skendžić, S., Tabak, J., Polić, M. and Orsag, M., 2021, June. Rapid Plant Development Modelling System for Predictive Agriculture Based on Artificial Intelligence. In 2021 16th International Conference on Telecommunications (ConTEL) (pp. 173-180). IEEE.
Polic, M., Ivanovic, A., Maric, B., Arbanas, B., Tabak, J. and Orsag, M., 2021, June. Structured Ecological Cultivation with Autonomous Robots in Indoor Agriculture. In 2021 16th International Conference on Telecommunications (ConTEL) (pp. 189-195). IEEE.
29th Mediterranean Conference on Control and Automation (Bari, Italy) was held online on June 22-25 2021. LARICS postdoctoral researcher Goran Vasiljevic presented his paper:
Vasiljević, G., Kovačić, Z. and Postružin, Ž., 2021, June. Solving nonlinear kinematics of a rail-guided inspection robot used for planning visual scans of reactor vessel internals. In 2021 29th Mediterranean Conference on Control and Automation (MED) (pp. 596-603). IEEE.
LARICS members actively participated in this year's edition of ICRA - International Conference on Robotics and Automation but only virtually. The conference was held May 30 - June 5, 2021 at the brand new magnificent Xi’an International Convention and Exhibition Center in Xi’an China.
Ana Batinovic presented the paper "A Multi-Resolution Frontier-Based Planner for Autonomous 3D" (A. Batinović, T. Petrović, A. Ivanovic, F. Petric, S. Bogdan).
Marsela Polic presented the paper "Compliant Plant Exploration for Agricultural Procedures With a Collaborative Robot" (M. Polic, M. Car, F. Petric, M. Orsag).
Antun Ivanovic virtually attended the Aerial Robotics Workshop (paper title: "Precision Airdrop Challenges with Multirotor UAVs", A. Ivanovic, M. Orsag) together with Bruno Maric and Marsela Polic.
Lovro Markovic presented the paper "Adaptive Stiffness Estimation Impedance Control for Achieving Sustained Contact in Aerial Manipulation" (L. Markovic, M. Car, M. Orsag, S. Bogdan).
Ivo Vatavuk presented the paper "Precise Jump Planning Using Centroidal Dynamics Based Bilevel Optimization" (I. Vatavuk, Z. Kovacic).
LARICS members paricipated in the first edition of Dronijada that took place on June 5 , 2021 in Varaždin. The event was organized by LERAMIS, Aeroklub Varaždin and Croatian International Airshow Varazdin, and featured FPV races, commmercial drone fly zone, and exhibiton.
LARICS memebrs took this opportunity to promote project AeRoTwin, and the upcoming DroneDays 2021, as well as the other activities of the lab and their equipment.

At the event "Robotics and AI in Society: Impacts and Questions Raised", organized jointly by the Faculty of Electrical Engineering and Computing and the Embassy of Portugal in Croatia, on May 20, 2021, an interesting exchange of expert opinions and quality discussion between scientists and members of the academic and diplomatic community.
The gathering was welcomed by H. E. Ambassador of Portugal Paula Leal da Silva, and Dean of FER, Prof. Gordan Gledec. The program was led by an experienced researcher Fausto Ferreira, from the Department of Automation and Computer Engineering.
Presentations by Prof. Pedra Lime, from the Superior Técnico Institute of the University of Lisbon and Tomislav Bracanović from the Zagreb Institute of Philosophy, were followed by the round table on the implications of introducing artificial intelligence in our daily lives, with special emphasis on its impact on our jobs. The round table was moderated by the Vice Dean for Research, Prof. Nikola Mišković, and attended by Prof. Stjepan Bogdan, Prof. Lime and Tomislav Bracanović.
Recording of the event is available on FER’s YouTube channel.
.jpg)
To kickoff the Conference on the Future of Europe, the Office of European Parliament in Croatia and the Croatian Parliament have organized a thematic event called "The Conference on the Future of Europe: Vision of Croatia". The emphasis of the event was placed on digital and green technologies, promoting successful stories and discussing a more equitable economy and education. UNIZG FER's Center for Artificial Intelligence, represented by professor Loncaric, was invited to showcase its efforts to digitally transform the Croatian society. Professor Loncaric was accompanied by LARICS team (professor Kovacic, Frano Petric and Ivan Hrabar) and our robot Pepper that became the first robotic member of the Croatian Parliament by interrupting the talk of Gordan Jandrokovic, the Speaker of the Parliament (Pepper, MP ). Pepper also had a more amicable interation with professor Loncaric, who used the opportunity to invite companies from Croatia to contact the Center for Artificial Intelligence to discuss the transfer of technologies being developed at the Faculty.
The event generated a lot of interest in the media (check the PRESS section), so we hope that the invitation of professor Loncaric will spark some future collaborations with the industry. We thank the Office of European Parliament in Croatia and the Croatian Parliament for the invitation, and Mrs. Renata Skalabrin for organising the event and accomodating all Pepper's requests.
This year's edition od Aerospace and Defense Meetings (A&DM) event is featuring a workshop, organized and held by AeRoTwin project partners, prof. Stjepan Bogdan, prof. Mario KOvač, prof. Anibal Ollero, and Silvia de los Santos. Covering different otpics, the partners are giving their respective talks on May 27, 2021, on the second day of the event.
More details available here.
"Matchmaking Program for the Aerospace and Defense Industries"
The 2021 edition of A&DM turns into a fully-digital event. The event will be held on 26th and 27th of May 2021 and gather the aerospace international community through pre-planned online B2B meetings, live conferences & replay videos and a virtual exhibition.
EDIT: The workshop was successfully finalized, with project partners giving following presentations:
Prof. Sjepan Bogdan (UNIZG FER): Autonomus Inspection of Wind Turbine Blades
Prof. Mirko Kovac (ICL): Physical Artificial INtelligence for Infrastructure Drones
Prof. Anibal Ollero (USE): Aerial Robots for Inspection and Logistics
.jpg)
Press release: ADM Sevilla 2021
Two LARICS student groups have become the recipients of the 2020 Rector Award. Borna Zbodulja, Jakov Vulama and Petar Ljubotina, mentored by prof. Zdenko Kovačić, won the award for their work 'Pepper as a welcome manager at the Faculty of Electrical Engineering and Computing', while Filip Bradarić, Marko Cavalli, Ivona Krajačić and Jelena Tabak, together with Andrea Rebec from the Faculty of Architecture, mentored by assoc. prof. Matko Orsag, won the award for their work 'Workshop for children: "Robofun". The abstracts of their works can be found here. Congratulations to the students and their mentors!
The 1st AIRPHARO workshop on Aerial Robotic Systems Physically Interacting with the Environment will be held October 4-5, 2021 at Ilirija Resort, Biograd na Moru, Croatia. Since this two-day event is taking place in Croatia, the IEEE Robotics and Automation Society is organizing the workshop together with LARICS.
AIRPHARO workshop is the successor of the workshops on Research, Education and Development of Unmanned Aerial Systems (RED-UAS). The workshop will focus on a high growth area of both research and industry, the use of aerial robots for physical interaction with people and the environment. For more details, please visit AIRPHARO 2021.
Prof. Stjepan Bogdan held a lecture on "Mission planning in heterogeneous robotic systems“ at the the first conference on trends and application of artificial intelligence Bounding Box 2021 that was held on Friday, March 26, in Osijek (Croatia), emphasizing that it is a fast-growing technology that is increasingly applied in various areas of business and life and is becoming an industry.
The conference was held hybrid, i.e. both online and live. At the opening, the organizers from the company Protostar Labs from Belišće and Creative Agency Adverta emphasized the desire to make it an annual event.
Its first edition was organized as part of the project "Improvement and automation of the VirtuAI Annotation system-adaptation of tools to the requirements of the market for the development of artificial intelligence technologies", an EU-funded project.
"Artificial intelligence is a technology that changes our lives and with its better understanding and application it is possible to improve a lot in various spheres of life and business," said the organizers.
Among the participants-lecturers at the conference are representatives of many companies in Croatia that deal with artificial intelligence, machine learning, application, i.e. localization and reading of QR codes in production and others, as well as experts from the Faculty of Mechanical Engineering and Electrical Engineering, organization CroAI, and others.
The topics discussed with the followers/audience at the conference were mostly professional ones, presenting work experiences, and related to machine learning, heterogeneous robotic systems, computer vision as a catalyst for change in many industries, application of neural networks in construction, challenges of artificial intelligence in various industries and others.
On Tuesday, March 30, 2021, LARICS is organizing an online presentation of Fulbright Scholarships Program for researchers and PhD students. The presentation will be held by Mrs. Vanja Ratković, Established Opinion Leaders Specialist from the U.S Embassy Zagreb. Assistant Public Affairs Officer Mrs. Elise Crane will make a short introduction to welcome the participants. The presentation starts at 10 a.m. via MS Teams platform. To join, please follow: Fulbright Scholarship Presentation
Last week, 4-6 March 2021, the IEEE International Conference on Inteligence and Safety for Robotics ISR2021 was held online (Nagoya, Japan). LARICS' PhD student Bruno Maric presented a paper:
B. Maric, F. Jurican, M. Orsag, Z. Kovacic: "Vision based collision detection for a safe collaborative industrial manipulator"
The IEEE ISR2021 brought together an international community of experts to discuss a way forward in robotics for the future of safety and security with intelligence by provisions of new research results and perspectives of future developments as well as achievements of social implementation.
DroneDays 2021 is finally happening! The aerial vehicles end-user workshop is going to take place in Biograd na Moru (Croatia) on the 4th and 5th of October 2021 at Ilirija Resort. The programme is yet to be confirmed. Please check DroneDays webpage regularly for all the updates as well as the programme and registration details.
LARICS got another team member – Dario Stuhne! Dario obtained a Bachelor's degree in Mechanical Engineering in 2019 and a Master's degree in Mechanical Engineering (specialization in Product Design and Development) in December 2020. He worked as a student teaching assistant at the Department of Applied Mechanics and at the Department of Design for 4 years, with a team of students from European universities for industrial partners Electrolux and ROLD, and in design and production departments for a year and a half year in companies Končar D&ST Inc., Vetropack Inc. and OMCO Croatia Ltd. His newest position in LARICS is Research Associate in the field of design and development of robotic mechanical systems. Wishing him all the best and many prosperous years with the team!
Continuing the collaboration on the ASAP project, on 16 December 2020 LARICS joined their partners from the Faculty of Civil Engineering in the inspection of the pedestrian bridge in Osijek.
This inspection marked the first deployment of new upgrades to their UAV (gimbal, IMU and high resolution lidar), which allowed them to detect and measure frequency of bridge vibrations, which are now being validated against measurements of the partners' obtained through standard techniques. Although hindered by cold temperatures, the project team also used this opportunity to thoroughly test the Ouster lidar by mapping the pylons and using them as a reference for autonomous navigation.
LARICS has again partnered up in two new projects that were kicked off in the last months - ESI ERDF project Development of environmentally friendly vehicle for cleaning public surfaces with autonomous control system based on artificial intelligence (EKOKOMVOZ) coordinated by company RASCO, and COST Action project Advancing Social Inclusion through Technology and Empowerment (a-STEP), with 17 states participating. On behalf of LARICS, both projects are coordinated by prof. Zdenko Kovačić.
Instead of the annually held University of Zagreb Fair and Doors Open Day at UNIZG FER, this year the event had a special edition. The alternative Windows Open Days featured a programme that was streamed via MS Teams. UNIZG-FER's “windows” were open from November 19 to 21, 2020. LARICS also participated in the programme within the session Introducing projects - Ask professors what you want to know about robotics. LARICS members presented the lab, their activities, robots, and projects. The extensive programme is available as YouTube videos at https://smotra.fer.unizg.hr/
Daily newspaper Vecernji list visited Specularia project team to discuss the impact of the implementation of 5G on both the global and domestic economies, in which exceptional speed of information, communication and services are becoming possible. Project Coordinator Matko Orsag and Specularia researchers explained how 5G technology will enable innovation and the implementation of ideas into reality, and their robots will finally be able to talk to each other and make decisions all the time.
Full article (in Croatian) available here.
Three more members have recently joined the LARICS team - Marijana Peti, Jelena Tabak, and Filip Zorić!
Marijana Peti graduated with a master's degree from the University of Zagreb Faculty of Electrical Engineering and Computing in 2020. During her studies, she received three “Josip Lončar” Awards and the City of Zagreb scholarships due to her academic success. Her research interests include multi-agent systems and unmanned aerial vehicles.
Jelena Tabak graduated with a master's degree from the University of Zagreb Faculty of Electrical Engineering and Computing in 2020. She is currently pursuing her Ph.D. and working as a Research and Teaching Assistant. Her research interests include soft robotics manipulation and machine learning.
Fillip Zorić graduated from the University of Zagreb Faculty of Electrical Engineering and Computing (UNIZG-FER) in 2018 by having successfully defended his master thesis Control of Multirotor-UAV by Using Variable Rotational Plane Rotors. After that, he worked in robotics start-up company Gideon Brothers for 2 years. As of October 2020, he a Research Assistant at LARICS in the scope of the Aerial-Core project where he is also pursuing his PhD degree. His research interests are in the intertwining of control, perception, and robotic manipulation.
The Laboratory for Robotics and Intelligent Control Systems (LARICS) has become a partner in new H2020 FET project WatchPlant - SMART BIOHYBRID PHYTO-ORGANISMS FOR ENVIRONMENTAL IN SITU MONITORING.
WatchPlant will develop a new biohybrid system technology, a wireless wearable self-powered sensor for in-situ monitoring of urban environments. This system equips urban biological organisms -plants- with Artificial Intelligence (AI) to create a smart sensor for measuring both, environmental parameters and the responding physiological state of plants, in a very early stage by the use of a barely explored fluid, phloem sap, in combination with chemical, and physical sensors. It will be integrated into complex network that allows performing distributed information processing, decision making, modeling and
data fitting, paving the way for the self-awareness or self-adaptation. Additionally, it will constitute a clean energy self-powered device due to the novel use of sap, not only for transforming plants into living sensors, but also for clean energy generation.
As one of three partners that participate in new ERASMUS+ project, LARICS researchers will be responsible for the 3rd semester curriculum of Joint Master program entitled Intelligent Field Robotic Systems (IFRoS). Also, LARICS staff will mentor master students in 4th semester during master diploma thesis preparation.
The Intelligent Field Robotic Systems (IFRoS) Master Programme aims to train a new generation of engineers who will develop new applications and tools to expand the capabilities of field robots in the near future. The technology behind the development of these systems comes from different research areas such as artificial intelligence, computer vision, control, sensorization, automatic learning, and others, all of them under fast-paced evolution in the current digital revolution. IFRoS is a 2-year joint master degree with 120 ECTS coordinated by the Universitat de Girona (UdG, Spain) together with the University of Zagreb (UNIZG, Croatia) and the Eötvös Loránd University (ELTE, Hungary) as consortium programme partners.
To commemorate Europe Code Week, an online exchange of knowledge and experience was designed and moderated by Sanja Pavlović Šijanović, Sanda Šutalo and Kristinka Lemaić with the involvement of students from three Croatian high schools.
At the invitation of Kristinka Lemaić, Petar Ljubotina, fourth-year student at the University of Zagreb Faculty of Electrical Engineering and Computing, presented the Industrial School of Mechanical Engineering with a short video. Petar was awarded the Rector's Award in the academic year 2019/2020 in the field of technical sciences for his scientific team work "Humanoid robot Pepper as a welcome manager at FER".
Special thanks goes to Prof. Zdenko Kovačić for giving the opportunity to high school students to gain insight into the work of FER students.
Given the current epidemiological situation, most of the events during the EU Code Week have been moved to the virtual world. The social initiative CodeWeek was launched by the European Commission with the aim of promoting programming and digital literacy. This event gathers more and more participants every year, so in 2019 the number of participants reached 4.2 million people from more than 80 countries.
Read more (in Croatian): Robotika i programiranje nisu bauk
LARICS team attended Breaking the Surface 2020 workshop from September 27 to October 4, 2020. This was the 12th edition of this international intersiciplinary field workshop of marine robotics and its applications, held every year in Biograd na moru, Croatia.
LARICS members actively participated in the workshop programme with their PhD presentations and tutorials, and attended lectures by AeRoTwin partners from the University of Seville (J. Ramiro Martinez de Dios, Augusto Gómez Eguíluz, Julio L. Paneque) and Imperial College London (Mirko Kovac, Crystal Winston, Andre Farinha, Julien di Tria), and the invited talk by Ivana Palunko (University of Dubrovnik) organized within H2020 AeRoTwin project.
Check the photos here.
On 23 September 2020, Prof. Zdenko Kovačić attended Croatia 4.0 Conference on new technologies, robotization and automatization in industry, buildings, power and energy business. He held a lecture on "Robotic assistive technologies for autistic people and people with disabilities“.
The Conference gathered and presented everyone that in any way comes in a contact with the new technologies in design, planning, manufacturing, control, monitoring, operation and traffic such as robotization, automatization, remote control, smart homes, buildings and cities, Internet of things (IoT), Blockchain, ‘cloud’ business.
LARICS nudi jedno znanstveno-istraživačko radno mjesto na istraživačkom projektu AgroSPARC: Napredna i prediktivna poljoprivreda za otpornost klimatskim promjenama koji provodi u suradnji s Agronomskim fakultetom i Inovacijskim centrom Nikola Tesla.
Radna mjesta obuhvaćaju razvoj inovativnog proizvoda koji će pomoći predviđanje razvoja pšenice umjetnom inteligencijom ovisno o vremenskoj prognozi i drugim uvjetima. Kandidati će pomoći izraditi sustav za uzgoj pšenice u izoliranim i željenim klimatskim uvjetima uz regulacijske petlje osvjetljenja, temperature, navodnjavanja, doziranja nutrijenata i dr. te sustav u oblaku za automatsko arhiviranje podataka o mikroklimatskim uvjetima i identifikatorima razvoja.
Što tražimo:
- motiviranog inženjera iskusnog u području automatike, robotike i elektotehničkih sustava koji se želi nositi sa znanstvenim i tehničkim izazovima u području Interneta stvari i umjetne inteligencije
- iskustvo u radu s Robotskim operacijskim sustavom
- iskustvo s korištenjem algoritama iz područja robotike
- poznavanje programskih jezika C++ i Python
Natječaj je otvoren od 24.9.2020. do 31.9.2020.
Zainteresirane kandidate molimo da pošalju email sa svojim životopisom i motivacijskim pismom voditelju projekta doc. dr. sc. Matku Orsagu (matko.orsag@fer.hr).
Our PhD students Antun Ivanovic, Lovro Markovic, Marko Krizmancic and Ana Batinovic attended the 2020 IEEE RAS Summer School on Multi-Robot Systems hosted at Czech Technical University in Prague from 14th to 18th of September 2020. The Summer School program aims at promoting the newest achievements in multi-robot system research.
The main scope of the program was swarm robotics, including lectures by well-recognized experts in the field, group seminars, computer practicals, and outdoor experiments. Moreover, the Summer School was a great opportunity for networking with other participants and lecturers.
You can find more about the Summer School at http://mrs.felk.cvut.cz/summer-school/
Check out photos in the Gallery.
The 2020 IEEE International Conference on Multisensor Fusion and Integration (MFI 2020) was held from 14th to 16th of September 2020 virtually. MFI 2020 is an international conference sponsored by the IEEE Robotics and Automation Society (RAS) and the IEEE Industrial Electronics Society (IES). LARICS' PhD student Bruno Maric virtually presented a scientific paper:
B. Maric, M. Polic, T. Tabak, M. Orsag, "Unsupervised optimization approach to in situ calibration of collaborative human robot interaction tools"
Our PhD student Antonella Barišić attended the Programming short course and workshop on Deep Learning and Computer Vision for Autonomous Systems from 19th to 21st of August, 2020. The workshop was held remotely with more than 40 participants.
The aim of the workshop was to provide theoretical and practical programming knowledge on applying computer vision techniques and deep learning to solve problems in robotics such as object detection and target tracking.
International Conference on Unmanned Aircraft Systems ICUAS 2020, as a hybrid conference, both virtual and physical event, was held from 1st to 4th of September 2020 in Athens, Greece. LARICS' PhD student Antun Ivanovic virtually presented a scientific paper:
A. Ivanovic, M. Car, M. Orsag, and S. Bogdan, “Exploiting null space in aerial manipulation through model-in-the-loop motion planning”
The video of demonstration experiments can be found here.
The International Federation of Automatic Control (IFAC) World Congress 2020, Germany was held virtually on July 11-17 2020. LARICS PhD Student Ana Batinović attended the conference and presented her paper:
Batinović, A., Oršulić, J., Petrović, T. and Bogdan, S., 2020. Decentralized strategy for cooperative multi-robot exploration and mapping. IFAC-PapersOnLine, 53(2), pp.9682-9687.
LARICS has got another team member – Dean Martinovic! After graduating from the University of Stuttgart Faculty of Electrical Engineering and Computer Engineering, Dean worked in the automotive industry as embedded software developer on AUTOSAR software components. After returning to the University of Stuttgart in 2012, he completed his Ph.D. in the area of magnetic field based localization systems for inductive charging purposes of electric vehicles. Wishing Dean good luck and a lot of successful endeavors in the LARICS team!
This year, International Conference on Robotics and Automation ICRA 2020 is being held form 31 May to 31 August as a virtual conference with some live events. LARICS' PhD students Bruno Maric and Marko Krizmancic have sent in video presentations of the following scientific papers:
Maric B., Mutka A., Orsag M., (2020), Collaborative Human-Robot Framework for Delicate Sanding of Complex Shape Surfaces
Krizmancic M., Arbanas B., Petrovic T., Petric F., Bogdan S., (2020), Cooperative Aerial-Ground Multi-Robot System for Automated Construction Tasks
The video presentations and the papers are now available to all registered participants of ICRA 2020.
LARICS team was busy before the pandemic shut everything down for a few months. Following his talk at E-Conference Better Future of Healthy Ageing 2020 (BFHA 2020), Professor Kovacic gave an interview for ZIMO portal on the preliminary work with Pepper robots being demonstrators of rehabilitation exercises and plans for the future of humanoid robots in healthcare.
Full article (in Croatian) is available here.
In celebration of the World Bee Day (May 20), Prof. Stjepan Bogdan held an invited talk “Swarm Intelligence in Animal-Robot Interaction” at the Technical Museum Nikola Tesla in Zagreb. Prof. Bogdan presented very interesting results of research done on bee communication channels and social behaviour of bees. The talk was a part of a special programme the Museum had prepared to raise awareness of the importance of pollinators, the threats they face and their contribution to sustainable development.
On 21 May 2020, LARICS team carried out dynamic median consensus experiments. Five aMussels were used to communicate underwater depth measurements trying to reach a common measurement value. The experiment was performed at Lake Jarun in Zagreb, and the results will be used to support a journal paper that is being prepared.
LARICS team is growing - Jurica Goricanec has joined the lab! After graduating from the UNIZG-FER, Jurica worked in the industry developing and designing UAVs for different purposes, such as collecting geophysical information and carrying out inspections. He is currently also doing his Ph.D. at the UNIZG-FER under the mentorship of Prof. Stjepan Bogdan. We wish him a lot of successful projects and a stimulating work environment. Welcome, Jurica!
The Laboratory for Robotics and Intelligent Control Systems (LARICS) has become a partner in two new projects – the EU H2020 AeroWind project and the Danieli Group project, for which grants agreements have been recently signed. Both projects have been kicked off in May 2020, and all the project activities will be implemented over a period of 1 year (Danieli), and 1.5 years (AeroWind), respectively.
LARICS has partnered up with Danieli Group to develop a pilot system that aims to show autonomous inspection of the process of steel elements production by using an unmanned aerial vehicle (UAV). The second project ‘Autonomous UAV inspection of wind turbine blades – AeroWind’ is a new EU project funded under the HORIZON 2020 programme. This project, built on previous research done by LARICS through FP7 project EuRoC, will focus on the implementation of novel methods for UAVs navigation and control, based on state-of-the-art technologies, increase in the speed and efficiency of wind turbine inspection, and a significant decrease in the cost of inspection and downtime of wind turbines.
A new chapter on 'Multi-rotor Systems, Kinematics, Dynamics, and Control of ' written by Stjepan Bogdan, Matko Orsag, and Paul Oh has been published in the Encyclopedia of Robotics.
The subject matter covered in the chapter – kinematic and dynamic model of the multi-rotor system – is the first step towards any real application of aerial vehicles. This includes various surveillance missions that require an eye in the sky, like search and rescue missions, infrastructure inspection, archaeology, film industry, and many more.
The Springer Reference Work Encyclopedia of Robotics addresses the existing need for an easily accessible yet authoritative and granular knowledge resource in robotic science and engineering. The encyclopedia is a work that comprehensively explains the scientific, application-based, interactive, and socio-ethical parameters of robotics. It is the first work that explains at the concept and fact level the state of the field of robotics and its future directions.
You can read the chapter here.
One of the first activities on the ASAP project was helping the partners from the Faculty of Civil Engineering inspect the Franjo Tudjman bridge in Dubrovnik, which took place between May 12th and 14th 2020.
The need for the inspection arose from the strong wind-induced vibrations in early April, and this opportunity was used to get an inside look into the process of infrastructure inspection but also to evaluate which aspects of the inspection can be performed with UAVs. Aditionally, some of our 3D data collection algorithms for the ENCORE project were tried out.
While the environment of a steel reinforced bridge proved to be challenging for the UAVs, LARICS team will build upon these insights and is already looking forward to the next inspection!
The new project “Heterogeneous autonomous robotic system in viticulture and mariculture (HEKTOR)” commenced on 13 March 2020. It is a three-year project funded by European Structural and Investment Funds (ESIF) and coordinated by the University of Zagreb Faculty of Electrical Engineering and Computing with Prof. Zdenko Kovacic as Project Leader. Project partners are the University of Dubrovnik (Institute for Marine and Coastal Research) and the University of Zagreb Faculty of Agriculture. Two UNIZG-FER laboratories are involved in the implementation of the project – Laboratory for Robotics and Intelligent Control Systems (LARICS) and Laboratory for Underwater Systems and Technologies (LABUST).
The main objective of HEKTOR project is to provide a systematic solution for the coordination and cooperation of smart heterogeneous robots/vehicles (marine, land, and air) capable of autonomously collaborating and distributing tasks in open unstructured space/waters. HEKTOR is conceived as a modular and autonomous system, adapted for various missions in viticulture and mariculture with the anticipated possibility of human intervention while performing various work, inspection and intervention tasks.
In line with recommendation given by National Civil Protection Headquarters and Croatian Institute of Public Health, and in order to mitigate the spread of coronavirus disease, DroneDays 2020 is postoned until further notice. New dates have yet to be determined.
LARICS team participated in the international robotics competition MBZIRC held from 23 to 27 February 2020. The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) is a biennial international robotics competition, organized by Khalifa University. The competition is held in Abu Dhabi, UAE, and is intended to be an ambitious and challenging set of tasks that aims to inspire innovative robotics solutions and technical excellence.
LARICS team for the MBZIRC2020 was led by Frano Petric with supervision of professors Stjepan Bogdan and Matko Orsag, and consists of LARICS’ PhD students: Barbara Arbanas, Marko Car, Antun Ivanovic, Marsela Polic, Ivan Hrabar, Ivo Vatavuk, Lovro Markovic, Ana Batinovic, Antonella Barisic, Robert Milijas and Marko Krizmancic. Being the robotics laboratory, LARICS decided to do the challenges autonomously.
Read all about LARICS' participation at MBZIRC at http://larics-mbzirc.fer.hr/index.php/mbzirc2020/
Faculty of Electrical Engineering and Computing had the honour to host a two-day regional workshop 'Space powering the Green Deal and the Digital Economy' that was co-organised with European Space Agency (ESA) and Croatian Ministry of Science and Education. The workshop took place on 5 and 6 March 2020 and welcomed more than 200 participants and national and international experts from the public and private sector that held more than 20 lectures on different topics related to space technologies, Earth observation data, and environmental protection.
This workshop was a unique opportunity for Croatian researchers and interested public to exchange information and ideas with European experts to define further steps in strengthening cooperation and explore opportunities for Croatian industry to become actively involved in ESA's programs and projects.
Photos are available in the Gallery.
Prof. Zdenko Kovacic attended European Robotics Forum (ERF) that was held 3-5 March 2020 in Malaga, Spain. Prof. Kovačić joined AeRoTwin project partners from the University of Seville, José Ramiro Martinéz de Dios, and Silvia de los Santos from Technological Corporation of Andalusia in promoting AeRoTwin project, attending lectures and workshops, and networking.
This was the 11th Annual European Robotics Forum ‘Future Robotics: Unlocking Human Potential’ hosted by Trade Fair and Congress Centre of Malaga (FYCMA). This iconic event put Spain at the heart of Europe’s most influential forum for robotics and artificial intelligence (AI).
More about ERF 2020 at https://www.eu-robotics.net/robotics_forum/press/malaga-inspires-erf202.html
The H2020 project "Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin" and Laboratory for Robotics and Intelligent Control Systems - LARICS, and IEEE Robotics and Automation Society, Croatian section invite you to the lecture "Human-robot collaboration to extend space missions through telerobotics" by Dr. Neal Y. Lii from the German Aerospace Center (DLR). The lecture which will be held on 6 March 2020 at 09:40 in the Auditorium Hall at the Faculty of Electrical Engineering and Computing, Zagreb, Croatia. The lecture will be held within European Space Agency (ESA)- Croatia regional workshop 'Space powering the Green Deal and the Digital Economy'.
More about the speaker and the talk can be found here.
On Saturday, 1 February 2020, LARICS members Marko Križmančić, Robert Milijaš and Antonella Barišić hosted around 20 second-grade students from the Elementary School Ksaver Šandor Gjalski in the LARICS lab.
The students had the opportunity to see LARICS' robots operate, and to learn about their functionalities in a simple and interesting way. The students also learned about different types of robots, how they move and perceive the world around them. Robot arm Franka was giving out candy and picking up items which caused a lot of excitement.
The students got to operate spheric robots Sphero and walking robots STEMI using a mobile phone application. The students had most fun interacting with the dancing humanoid robot Pepper. They also expressed great interest in UAVs and remote controlling. Everyone learned a lot of new things and the hosts had a difficult task answering all the questions.
Check out photos and students' drawings inspired by the visit in the Gallery.
LARICS members attended the three-day Robotics Fair 2020 in Ljubljana that took place from 11th to 13th February 2020. Robotics is an international trade fair dedicated to industrial robotics and unmanned systems. The event offers the exhibitors a platform for presenting their range of robot technologies in both industrial and service robots sectors.
The Fair was organised by ICM Slovenia. LARICS members attended the event as representatives of three UNIZG FER laboratories: LARICS, LABUST and LAMOR, under the common brand ROBOTICS FER, next to some of the top tech companies in this field. The visitors had an opportunity to learn about current projects of UNIZG FER's laboratories', their research, innovations and equipment.
All the exhibitors also had excellent opportunities to strengthen their image, increase brand awareness and establish new business relationships. The content-rich accompanying programme included roundtable discussions, presentations and workshops.
In the first week of February 2020, Bahadir Basaran from the Imperial College London, together with our own Marko Krizmancic and Antun Ivanovic, worked on experiments as part of collaboration within AeRoTwin project.
The main goal was building a wall with teams of aerial vehicles specialized for spreading infil mixture between brick layers, and brick pickup and placement. The team developed a mission planner for aerial vehicles collaboration and conducted experiments on a mockup scenario.
ESA-Croatia EO workshop 2020 "Space powering the Green Deal and the Digital Economy" will be held 5-6 March 2020 at the University of Zagreb Faculty of Electrical Engineering and Computing.
The workshop is being jointly organised by the Croatian Ministry of Science and Education, University of Zagreb, Faculty of Electrical Engineer and Computing and the European Space Agency under the auspices of the Croatian Presidency of the Council of the EU.
This workshop will be the opportunity to confront needs and solutions and it will gather policy makers, scientists, service operators and EO application specialists.
More details about the workshop at croatianspace.info
On 8 January 2020, Ivana Mikolic held an invited talk within the 5th year course Organisation and Management at University of Zagreb Faculty of Economics and Business. Ivana was invited by the Dr. Rebeka Danijela Vlahov together with Andrej Hanzir (LEAP Summit) to share knowledge and experience in managing EU projects. After the introductory presentations, a panel discussion was initiated between the guest lecturers and the students.
The Laboratory for Robotics and Intelligent Control Systems - LARICS (UNIZG FER) is looking to recruit 1 (one) employee for the position of a Researcher on the project ASAP - Autonomous System for Assessment and Prediction of infrastructure integrity.
The ASAP project develops a system for autonomous inspection and prediction of the integrity of transport infrastructure, as part of intelligent transportation systems and logistics for maintenance, monitoring and management. The system includes experimental testing of buildings using robots and drones, as well as real-time wireless data collection. Post-processing combines experimental test results and numerical models to predict the service life and residual load-carrying capacity of structures, and enables data to be stored in a database for end-user needs.
The advantage will be given to applicants who have experience in the synthesis and analysis of drones control algorithms.
If you are interested in the position, please send a short application email with attached CV to this address by Thursday, 30 January 2020 (midnight). Candidates will be contacted shortly after their application for an interview.
On Thursday, 23 January 2020, Prof. Felipe Gonzalez, Associate Professor at Queensland University of Technology (QUT) in Brisbane, Australia, will give a lecture on “Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation”. This IEEE Robotics and Automation Society, Croatian section technical lecture will be held at 11 a.m. in room C-09-01.
Dr. Gonzalez interest is in creating aerial robots, drones or UAVs that possess a high level of cognition using efficient on-board computer algorithms using advanced optimization and game theory approaches that assist us to understand and improve our physical and natural world. Dr. Gonzalez lead the Airborne Sensing Lab at QUT. He is the co-author of several books in UAV based remote sensing and UAV based design based on evolutionary optimization and game strategies and as of 2018 has published nearly 130 refereed papers. He is also a Chartered Professional Engineer, Engineers Australia – National Professional Engineers Register (NPER), a Member Royal Aeronautical Society (RAeS), The IEEE, American Institute of Aeronautics and Astronautics (AIAA) and Holder of a current Australian Private Pilot Licence (CASA PPL) and a Remote Pilot Licence (RePL from CASA).
On 15 January 2020, Prof. Stjepan Bogdan and Prof. Nikola Miskovic held an invited lecture called ‘Heterogeneous Mobile Robots Mapping the Present and the Past’ at the Time Machine Croatia Info Day.
This event kindly invited the interested public and experts in the field of humanities, culture, science, history, IT and the research sector to learn more about the Time Machine project as well as the Time Machine Organisation.
The Time Machine Project is by far the most ambitious and far-reaching project ever undertaken using Big Data of the Past. Revolutionising the way we experience European history and culture, the project is an international collaboration to build a map of European history that spans thousands of years.
On 2 January 2020, Croatian daily newspaper Jutarnji list published an article on project Specularia (Structurized Ecological Cultivation with Autonomous Robots in Indoor Agriculture). Project team members Ivana Mikolić, Bruno Marić, Antun Ivanović, Matko Orsag and Marsela Polić explained in a nutshell the objectives of the project and its scientific, technical and implementational aspects.
- Robotic systems can help small farms with farmland that is difficult for a family to cultivate. One of agricultural critical issues is lack of workforce, young people interested in ariculture. Robotics is a lifeline for our economy, said Project Coordinator Dr. Matko Orsag.
You can read the article (in Croatian) here.
On 20 December 2019, project 'Autonomous System for Assessment and Prediction of Infrastructure Integrity (ASAP)' officially began. The three-year project is funded by ESI European Regional Development Fund. Project coordinator, the Faculty of Civil Engineering (UNIZG-GF) is implementing the project together with their partners - Faculty of Electrical Engineering and Computing (UNIZG-FER) and Faculty of Mechanical Engineering and Naval Architecture (UNIZG-FSB).
The aim of the ASAP project is to develop a system for autonomous inspection and prediction of the integrity of transport infrastructure, as part of intelligent transport systems and logistics for road and rail infrastructure maintenance, monitoring and management. The system involves the autonomous conduct of experimental testing of materials and construction using robots and UAVs, real-time wireless data acquisition, and post-process integration of experimental test results and numerical models to estimate the service life and residual load-carrying capacity of the structures, and store the data in a large database for end users.
ROBOWEEK activites have been successfully finalized – Sunday (Dec 15, 19) ROBOBAND concert at KSET; Wednesday (Dec 18, 19) lecture "Real-World Robotics: From Swarms to Entrepreneurship" held by Prof. Daniel Lofaro (University of George Mason) and Prof. Neil Dantam (Colorado School of Mines); ROBOTIC FOOD COURT and ROBOFUN interactive workshops on Thursday (Dec 19, 19). Supported by the U. S. Embassy Zagreb, these events served to popularize robotics and spread holiday cheer, all for a good cause. The raised donations will be given to the Association for improving the quality of life of poor and neglected children "Mali zmaj".
Check out photos in the Gallery.
Article on 'Highly-scalable traffic management of autonomous industrial transportation systems' written by Ivica Draganjac, Tamara Petrović, Damjan Miklić, Zdenko Kovačić, and Juraj Oršulić has been published in Robotics and Computer-Integrated Manufacturing journal.
In this article, a method for highly-scalable coordination of free-ranging Automated Guided Vehicles (AGVs) in industrial environments is presented together with experimental results obtained on a system comprising six vehicles and simulation results with up to fifty vehicles.
Robotics and Computer-Integrated Manufacturing journal is on disseminating the application of research to the development of new or improved industrially-relevant robotics, manufacturing technologies, and innovative manufacturing strategies. Preference is given to papers describing original research that includes both theory and experimental validation.
Full article is available online by February 01, 2020 at:
https://www.sciencedirect.com/science/article/pii/S0736584518303843?dgcid=author
The H2020 project "Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin" and Laboratory for Robotics and Intelligent Control Systems - LARICS invite you to the lecture: "Real-World Robotics: From Swarms to Entrepreneurship" by Daniel Lofaro, George Mason University, which will be held on 18th December 2019 at 12:00 in the Gray Hall of the Faculty of Electrical Engineering and Computing, Zagreb, Croatia.
The lecture is organized under the programme Robotics Food Court which is supported by the U. S. Embassy in Croatia.
More about the speaker and the talk can be found in the detailed news content or here.
Ivana Mikolić has been nominated as a finalist of the Project Management Awards 2019 for the best young project manager for the organization of the international interdisciplinary field workshop of maritime robotics and applications “Breaking the Surface (BtS)”. This is a unique award for project management in Croatia. The award is given by the Croatian Association for Project Management (full member of the International Project Management Association, IPMA) and IPMA Young Crew Croatia. The winners will be announced at the award ceremony at hotel Esplanade in Zagreb on December 17, 2019.
More details at IPMA Young Crew Croatia.
The new project “AERIAL Cognitive Integrated Multi-task Robotic System with Extended Operation Range and Safety (AERIAL-CORE)” commenced on December 1, 2019. It is a four-year project funded under HORIZON 2020-ICT, and coordinated by the University of Sevilla (Prof. Anibal Ollero). FER (LARICS) is partaking as a project partner, together with other European partners.
The main objective of AERIAL-CORE is the development of core technology modules and an integrated aerial cognitive robotic system that will have unprecedented capabilities on the operational range and safety in the interaction with people, or Aerial Co-Workers (ACW), for applications such as the inspection and maintenance of large infrastructures.
The project will integrate aerial robots with different characteristics to meet the requirements of:
- Long range (several kilometres) and local very accurate (subcentimetre) inspection of the infrastructure capability;
- Maintenance activities based on aerial manipulation involving force interactions; and
- Aerial co-working safely and efficiently helping human workers in inspection and maintenance.
In November 2019, two LARICS PhD students, Marsela Polic and Marko Car visited the Aerial Robotics Laboratory at the ICL. The students first participated in the training activity, during which they had a guided laboratory visit. They also attended a guest lecture from prof. Masayuki Inaba from the University of Tokio and participated in an origami robotics workshop.
Following the training activity, the students continued their visit to the ARL within the short-term visit, during which they worked on a joint research project proposal together with Dr. Hai-Nguyen Nguyen (post-doc) and Chuqian Lou (PhD student), under the supervision of Dr. Mirko Kovac (laboratory director). The research proposal investigates the possibility of integration of soft robotics paradigm into the UAV control scheme using the origami robotic structures. During the visit, compliant force sensing origami prototypes were designed and tested on mechanical, hardware and software level. An origami casing for UAV mechanical compliance was designed, including both micro origami repeating pattern and macro structure with UAV mounting. Available state of the art micro depth cameras were tested, and the optimal one was chosen. The raw data acquisition was implemented and tested. A long-term timeline for the project progress was defined, during which the origami structure will be manufactured, tested, and implemented. The compliant sensing capabilities will be realized using machine learning and deep learning techniques.
This year LARICS team members are organizing again a robotic charity event, together with KSET and professors from the University George Mason (USA), with the goal to raise funds for the Association for improving the quality of life of poor and neglected children “Mali zmaj”. All the planned activities are taking place between December 15 and 19, 2019 at KSET and in the Faculty’s lobby. The programme of the ROBOWEEK is the following:
- on Sunday, December 15, 2019, from 8 to 11 p.m., on KSET’s stage, the visitors will have the opportunity to attend a unique performance of the ROBOBAND! Robots will be warming up the audience and spreading holiday cheer by playing different instruments, accompanied by FER’s professors and students;
- on Monday, December 16, 2019, professors from the University George Mason (USA) will hold a lecture for FER’s graduate and postgraduate students, and a lecture for the general public to present their science popularization projects;
- on Thursday, December 19, 2019, from 10 a.m. to 6 p.m., in FER’s lobby, at the ROBOTIC FOOD COURT, our well-known little robotic helpers Pepper, Franka and Baxter will be serving warm drinks and cookies, while primary and secondary school students will have a chance to attend interactive ROBOFUN workshops.
The co-organizers of the event, University of George Mason professors are planning to hold a similar event in April 2020 at their University.
We wholeheartedly invite you to join us in doing a good deed and spreading joy!
LARICS' PhD students Antonella Barišić and Marko Car are currently attending the 2019 International Workshop on Research, Education and Development on Unmanned Aerial Systems, RED-UAS 2019, held in Cranfield, UK, at the Cranfield University taking place from 25 to 27 November 2019. They presented the following papers:
Barisic, A., Car, M., Bogdan, S., (2019), Vision-Based System for a Real-Time Detection and Following of UAV
Turkovic, K., Car, M., Orsag, M., (2019), End-Effector Force Estimation Method for an Unmanned Aerialmanipulator

RED-UAS 2019 aims to bring together representatives from academia, industry or government agencies working in the rapidly expanding research area of Unmanned Aerial Vehicles. Focused interests of diverse groups involved in UAS research and development is discussed. Special emphasis is given to current and future research opportunities.
LARICS, LABUST and LAMOR did a great job representing UNIZG-FER at the University of Zagreb Fair 2019 held between November 21 and 23, 2019 at the Student Centre Zagreb, and at the Open Door Day at FER on Saturday, November 23, 2019. Future students and visitors had the opportunity to talk to the members of our laboratories, check the equipment, interact with Pepper, compete against Baxter in solving a Rubik’s cube, and try out navigating the autonomous surface platform H20mniX in an indoor pool! The visitors were also able to learn about the laboratories’ current projects, activities, and prospects of studying at FER.
Check the photos in the Gallery.
The Faculty Council of FER awarded LARICS (Laboratory for Robotics and Intelligent Control Systems) with the Science Award for achieving internationally recognised results in the field of robotics in the past year. Head of Laboratory Prof. Zdenko Kovačić was honoured to receive this special award on behalf of LARICS.
In honor of the 50th anniversary of the Apollo 11 moon landing, the U.S. Embassy Zagreb organized the reception and a closed screening of the Apollo 11 Documentary Film at the Kaptol Boutique Cinema. Project leaders of grant projects funded by the Embassy Matko Orsag and Ivana Mikolic attended the event accompanied by the new addition to the project team Ana Golec. Deputy Chief of Mission Victoria Taylor hosted the reception and in the welcome address reminded us of two Croatian-Americans who were part of the Apollo 11 mission – Mike Vucelic and George Skurla.
AeRoTwin Coordinators prof. Stjepan Bogdan and Ivana Mikolić participated at the national Horizon 2020 Info Day on Spreading excellence and widening participation programme on 24th October 2019. Stjepan presented Twinning project AeRoTwin as an example of excellent written proposal and implemented project.
Stjepan and Ivana then participated in a Q&A session with representatives from other faculties and institutes in order to share their knowledge and experience and increase proposal submission from Croatia.
Ivana Mikolić held an invited lecture "Managing EU scientific-research projects" at the University of Dubrovnik on 10th of October 2019. More than 30 University's teaching and administrative staff participated in the lecture. The lecture was organized in the scope of AeRoTwin project and by the IEEE Oceanic Engineering Society University of Zagreb Student Branch Chapter.
The lecture presented in detail all phases of the projects - from proposal writing, to project implementation, and to evaluation. The possibilities of using EU funds from different programmes were presented. Project preparation and management were elaborated through practical examples. All project phases were presented from a technical, managerial, financial and administrative perspective. The aim of the lecture was to gain a better understanding of EU projects, proposals and calls, as well as the tools used to manage them.
As a part of final media event for the "Quick, healthy and available to all" project of the UNUO centre, our Pepper played a minor role in the "Spoon of Amor" play which showcased the work of UNUO in education of people with disabilities. The play revolves around falling in love over food, since UNUO is focused on teaching people to cook and work in a professional kitchen. We would like to extend our thanks to Vedran Habel, a professional chef and founder of the UNUO, for inviting us to take part in this heart-warming event. We also congratulate everyone involved on a great show, we had a blast! And while Vedran's work and work of the UNUO continues, so will our efforts to find avenues for future collaboration.
FER is establishing Artificial Intelligence Centre, the first such institution in Croatia. The Centre will be the pivotal institution to co-ordinate the activities in the field of AI development, as well as the key link between the public sector and the scientific community. Its activities will also largely be directed towards using AI for socially responsible purposes. LARICS is one of the fourteen research laboratories which constitute the Centre. On two occasions, on the Croatian Radio Television channel 4, and on RTL TV channel, Prof. Zdenko Kovačić was answering questions about the role and future of the Centre.
Prof. Zdenko Kovačić attended the 27th International Conference on Software, Telecommunications and Computer Networks (SoftCOM 2019) in Split, Croatia, where he presented the paper entitled “NAO Robot as Demonstrator of Rehabilitation Exercises after Fractures of Hands”. The paper brought to attention the results of the work of a LARICS student Dora Matić on the robot’s assistance to physiotherapists during rehabilitation exercises with patients with healed hand fractures. Eighteen exercises were analysed and using the Choregraphe programming tool for the NAO humanoid robot, a choreography has been made for them (see video on the LARICS’ YouTube channel).
Prof. Zdenko Kovačić attended the Market Activities Circle Forum of the PostEurop COG-LO project that was held in Split, Croatia. Prof. Kovačić presented the research work of LARICS on Intelligent Services and Production (ISP) with the emphasis put on technologies related to Post Office Logistic Solutions with Robots. Also, he presented the technology solutions offered by the LARICS’ spin-off company RoMb Technologies. The host of the forum was the Croatian Post (Hrvatska pošta).
Prof. Zdenko Kovačić attended the European Conference on Mobile Robots held in Prague, Czech Republic, where he presented the poster titled “Autonomous Robots as Actors in Robotics Theatre - Tribute to the Centenary of R.U.R.”. The poster contained the description of the proposed research aimed towards developing foundations for the implementation of the play R.U.R. (Rossum’s Universal Robots) of the Czech writer Karel Čapek with Pepper and NAO humanoid robots acting together with human actors. This work was inspired by the 100th anniversary of R.U.R. in 2020 (see video on the LARICS’ YouTube channel).
LARICS is looking for financial administrators, project administrators, event organizers and/or dissemination coordinators!
LARICS is involved in various scientific and industry projects and organizes multiple events funded by the EC, NATO, national institutions, local and international companies, and many more. We are looking for new employees willing to help us run these projects and organize them with the help of and under the supervision of our laboratory manager.
Responsibilities for the successful candidate(s) will include (depending on the given job role):
- preparing project documents and administrative reports
- monitoring project expenses and keeping track of the budget
- preparing financial reports
- engaging with the media
- creating content for our websites and social platforms
- organizing dissemination activities
- organizing various laboratory events
- any other duties as required and relevant to the role and grade
Qualifications:
- excellent written and spoken Croatian and English is essential
If you are interested in the position, please send a short application email with attached CV to this address until 30th of September 2019. Candidates will be contacted shortly after their application for an interview.
Contact: Ivana Mikolić, 091 604 7559
On 3 July 2019, Antonella Barišić and Marko Križmančić, two of our stipendiaries and future members, received rector's award for their work titled Decentralized formation control for a multi-agent system of autonomous spherical robots. The abstract of their work in Croatian is available on this link, while the video of the experimental results can be found here.
This marks the 21st rector's award for students associated with LARICS and continues the streak of awards started in 2011. Congratulations to Antonella, Marko, and their mentor prof. Stjepan Bogdan!
After seeing our work through Dronedays and AeRoTwin activities, we were invited by several companies to investigate the posibilities of future collaboration.
We were first invited by Koncar and Atos Hrvatska to the Pometeno Brdo windfarm on 2 July 2019 to demonstrate the capabilities of our UAVs in wind turbine inspection tasks. With supervision from Jurica Goričanec from Geoarheo, our Kopterworx UAV performed all planned tasks and results we obtained are looking promising for a future collaboration. We were also invited by Geodetski zavod Rijeka to the Grobnik airport on 9 July 2019 to showcase 3D mapping and georeferecing capabilities of our UAV. Gathered data is still being processed, but we hope it will facilitate interesting future collaborations.
LARICS' PhD students Barbara Arbanas and Ana Batinović spent four weeks (June 2019) at the University of Seville, Spain, as a part of Aerotwin staff exchange programme.
They were interns at Department for Systems and Automatic Engineering under supervision of professor Jose Ramiro Martinez de Dios. The main focus was on integrating SLAM, obstacle avoidance algorithm and a mission planner for UAV-UGV cooperative teams. Barbara worked on a new task allocation algorithm and Ana on both static and dynamic obstacle avoidance algorithm based on potential fields. Moreover, results will be presented as a joint conference paper and future collaboration.
Within NATO SfP project MORUS and EU project AeRoTwin, Lovro Marković and Marko Car attended the European Control Conference from 25th to 28th of June, 2019 in Naples, Italy. At the conference Lovro presented their paper titled Geometric Tracking Control of Aerial Robots Based on Centroid Vectoring.
Their paper focuses on presenting the concept of geometric tracking control for an unmanned aerial vehicle (UAV) based on variations in centerof gravity (CoG). The proposed UAV model has the ability to exploit its dynamic CoG as a means of stabilization and control. A mathematical model of such a system is used as a base for developing the nonlinear geometric tracking controller on the special Euclidean group SE(3). Finally, two unique UAV models, presented with a trajectory tracking problem, are simulated in a realistic simulation environment. Performance of the selected control terms is analyzed based on relevant simulation results.
On 22 June 2019, Frano Petric presented our experiences with the ADORE project at the first Assistive technologies and communication conference (ASTEK) in Belgrade, Serbia.
Following our collaboration with Alfanum and professor Delic from the Faculty of Technical Sciences in Novi Sad, we were invited to present our experience of using humanoid robots with children with autism. Through the talk "Diagnosing ASD with a robot evaluator - experiences from the ADORE project" Frano talked about the technology behind the robot-assisted ASD diagnostics, challenges we faced but also about mixed reactions of the children to the robot and overwhelmingly positive reactions from the parents and caregivers.
We would like to thank ASTEK organizers and especially professor Delic for the invitation and are hoping we will be able to take part in future ASTEK events.
The paper titled Centroid vectoring control using aerial manipulator: Experimental results was presented by Antun Ivanović at the international conference IEEE International Conference on Unmanned Aircraft Systems within projects Specularia and AeRoTwin. The conference was held 11-14 June 2019 in Atlanta, USA.
This paper addresses the issues of aerial manipulation and its dynamic center of mass variations by deriving a control principle capable of exploiting this disturbance as a means to stabilize the UAV. The UAV utilizes both rotors variations and centroid vectoring for attitude control and the control structure was further augmented with position control. The main focus is on experimental validation of the system.
On 20 May 2019, during the Croatian Academy of Engineering (HATZ) General Assembly, LARICS team member and Asst. Prof. Matko Orsag was awarded a Young Scientist Award "Vera Johanides", which is a recognition of his rich contribution to science and the field of engineering - We would like to congratulate our colleague on his success and wish him even more success in the future!
On 20-24 May 2019, the International Conference on Robotics and Automation (ICRA 2019) was held in Montreal, Canada, and three of our Lab's members took part in it. Prof. Stjepan Bogdan went to the conference to take part in the workshop titled "The Future of Aerial Robotics: Challenges and Opportunities" as a speaker on the topic of “Full Autonomy in Aerial Manipulation”, while Barbara Arbanas and Goran Vasiljević presented their work and the results of the subCULTron project within the Marine Robotics section of the event. Take a look at a couple photos from the event in the detailed news!
Yesterday, 4th June 2019, the TV show "Školski sat" aired on Croatian National Television (HRT 2), the episode was titled "On robots and humans" with the topic of robotics. Our Lab's Matko Orsag and Frano Petric took part in the show together with the humanoid robot Pepper, and they discussed how robots work with people, how they might help us in the future and what questions might arise in this process. The show also featured segments about the fund-raising event we had for Christmas, as well as our work with robots in the Laboratory. Take a look at the episode via this link (in Croatian)!
LARICS members took part in another Festival of Science in Zagreb, an event aiming to bring science closer to the general public which was held from 8th to 13th April 2019. The main topic of the festival was colors, but it also included many other interesting and innovative branches of technology, including robotics. This is why the robotics@fer.hr brand, which consists of LARICS, LABUST and LAMOR, also took part in the event and had workshops and an exhibition. Matko Orsag, Frano Petric and Barbara Arbanas represented our Laboratory at the event.
Prof. Zdenko Kovačić was a Keynote Speaker at the 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics MIPRO 2019 in Opatija, Croatia where he gave a lecture titled “Industry 4.0: Experience of Technology Transfer from an Academic Laboratory to Manufacturing Sites of Industrial Partners”. He also participated in the panel discussion on “Intelligent Production” organized by MIPRO, Danieli Automation and the Faculty of Electrical Engineering and Computing. The objective of the panel was to discuss directions toward merging various information, technologies, big data and computer controls to optimize manufacturing processes in smart factories.
Prof. Zdenko Kovačić appeared in the TV show “Studio 4” aired on the Croatian Radio Television (HRT 4) together with Mr. Zlatko Katalenić, a roboticist from Slovenia. They discussed common topics such as the role of robotics in industry, what the current state of robotics in Croatian industry is, and how artificial intelligence could help robots to work together with people.
Prof. Zdenko Kovačić took part in the panel discussion “The Fourth Industrial Revolution: Erasing Borders among Physical, Digital and Biological Sphere” that was held in Osijek, Croatia within the 2nd International Forum ICT-Society #RobotsAreComing dedicated to the topic “Impact of robotization on Economy and Societal Transformations”.
A high-level delegation of Danish top IT managers and experts visited FER with the aim to get acquainted with the results of ICT-related research projects at FER. Prof. Zdenko Kovačić, in cooperation with prof. Stjepan Bogdan, prof. Jan Šnajder, prof. Mario Vašak, prof. Ivana Podnar-Žarko, prof. Mario Kušek, prof. Siniša Šegvić, and Ivan Krešo, held a workshop that was highly regarded and appreciated by the esteemed guests.
On 24 April 2019, members of LARICS working on our Specularia project went to Agrivi, a company applying the newest software and technological innovations to agriculture. Matko, Ivana, Antun and Marsela talked to them about which agricultural crops and cultures they should use as part of the project and which activities can be done with the individual plants in their various stages of growth. They also learned a lot about Agrivi's work and how they use these innovative technologies, which they could also apply to the project in a number of ways.
Asst. Prof. Matko Orsag was invited to be a speaker in the panel discussion titled "The Future of Agriculture in the EU" organized by the Economics Clinic (Ekonomska klinika) as part of the "My voice in the EU" ("Moj glas u EU") event, held on 24 and 25 April 2019 in Zagreb. Together with other speakers at the panel discussion, he talked about his research field, particularly the Specularia project and the application of robotics in agriculture, as well as about future plans, trends and expectations in agricultural sciences and practical applications. Together the speakers answered the listeners' questions. More info on the event can be found here.
LARICS' Matko Orsag took part in the Zagreb Energy Congress - ZEC 2019, organized by the IEEE Student Branch University of Zagreb on 10-14 April, 2019 at our Faculty. He held a lecture titled "Robots in Service of Human Kind" during the Academy Day of the event and told the attending students and listeners about what robots are doing for humans and what they could potentially do in the future, particularly in relation to agriculture and our Specularia project, but also in relation to the energy sector. LARICS was a silver sponsor of this event. You can read the lecture abstract and see a few pictures in the detailed news.
Members of LABUST and LARICS working on the subCULTron project used a sunny day in Zagreb to conduct field experiments with the aPads and aMussels. They went to the lake Jarun and tested the robots in a realistic environment, all in preparation for an upcoming anoxia workshop, which will be held in the Venice Lagoon in July of 2019. Take a look at a couple of pictures from lake Jarun!
PhD student Zoran Vrhovski, mentored by our prof. Stjepan Bogdan, took part in yesterday's PhD Day at our Faculty as part of the poster section of the event. His poster and his PhD thesis deal with the topic of creating a system for Leg Length Discrepancy Evaluation and Compensation for Human Body Balancing, and can be see by following this link (the poster is in Croatian). Zoran's poster left a great impression on the committee and it was awarded as best poster of the event! We would like to congratulate our colleague on this success and wish him even more success in his future research.
The first edition of our two-day end-user aerial vehicles workshop DroneDays, held at the University of Zagreb Faculty of Electrical Engineering and Computing in Zagreb, Croatia, on 26 and 27 March 2019, was a great success and exceeded all of our expectations. Over 200 participants listened to 17 lectures by aerial robotics experts, there were 9 demonstrations in the flying zone, and some 2000 visitors came to the company expo to learn about aerial vehicles and their applications. DroneDays was organized by UNIZG-FER and LARICS as part of the project AeRoTwin. Read more about our exciting event in the detailed news!
An article on an international EU FP7 project we worked on, ASSISIbf, was published in the newest issue (27 March 2019) of the magazine Science Robotics, and our professor Stjepan Bogdan is one of the authors of the paper. The article is titled "Robots mediating interactions between animals for interspecies collective behaviors" and it deals with the interesting results of this unusual robotics project. The article abstract is available on this link, while the full article is available via the official website of the magazine for AAAS members and registered users.
Our Lab's project manager Ivana Mikolić went on 29th March 2019 to the LEAP Summit in Zagreb, Croatia, where she held a lecture at the EU & ME Stage titled "Increasing robotics research excellence with the EU". Ivana talked about her experiences in managing EU and Croatian projects, why they are important and how they can be used to advance our scientific and technological potential. Ivana also gave some recent examples of LARICS and LABUST projects, such as AeRoTwin and DroneDays, to show how EU funding can successfully be applied in the context of robotics in Croatia and the EU.
Members of our lab went to Bucharest, Romania, on 19 to 24 March, to take part in the European Robotics Forum 2019 to represent the robotics@fer.hr brand, which includes three robotics laboratories from the University of Zagreb Faculty of Electrical Engineering and Computing: LARICS, LABUST and LAMOR. There they took part in lectures and workshops, presented their work and some of the laboratories' robots and brought our work closer to the public and the robotics community.
During the event, euRobotics also announced that LARICS was the ERL Emergency Service Robots Best Team of Season 2018/2019, which is a great honor and confirmation of our hard work done at ERL and in preparation for it. Zdenko Kovačić received the award for LARICS during the banquet at ERF.
You can see a couple of photos from the event by following this link.
The Croatian Agency for Mobility and EU Programmes (Agencija za mobilnost i programe Europske unije) has published a brochure titled Horizon 2020 Success Stories in Croatia, which features one of our H2020 projects - subCULTron! We are proud to have taken part in this successful project and we invite you to take a look at the brochure and read about subCULTron, as well as other stories about successful projects in our country.
Professor Stjepan Bogdan went to Abu Dhabi to take part in the 2019 International Symposium on Robotics and Artificial Intelligence on March 10 and 11, where he held a lecture in the Aerial and Underwater Systems session. The lecture was titled "Aerial Robotics – manipulation and interaction with the environment", dealing with the topic of present results in aerial robotics done in our Lab, particularly when it comes to the problem of controlling the force of interaction between an aerial vehicle equipped with a dexterous manipulator and the environment. You can find more info on the event, as well as a book of abstracts, by following this link.
Another RADDAR workshop, organized in collaboration with the Fifth Gymnasium in Zagreb (MIOC), was held at UNIZG-FER this weekend, on 9th March 2019, during which RADDAR programme attendees went on a tour of our robotics laboratory and learned about how our robots work and what can be done with them. A lot of focus was put on our Pepper robot, so prof. Zdenko Kovačić made sure to help the high-school students get to know more about the interesting field of humanoid robots and the services they can offer. Find out more information on this workshop by following this link (in Croatian).
Our asst. prof. Matko Orsag appeared on 7th March 2019 as a guest speaker for the Croatian National Television's show Dobar Dan, Hrvatska to talk about technological advancements in robotics, particularly aerial robotics, and to introduce the public to our upcoming two-day end-user workshop on aerial robotics, DroneDays. The show also featured a segment on our laboratory and what LARICS members do for this field of technology. Prof. Pero Škorput from the Faculty of Transport and Traffic Sciences, who will appear at DroneDays as an invited lecturer, was also a guest in the show to talk about the future of traffic and transport. The whole show can be seen via the HRTi service (in Croatian; registration is necessary).
Our Asst. Prof. Matko Orsag went to Čakovec, Croatia, on 28 February 2019 to take part in an conference on agriculture titled "Managing knowledge in agriculture" ("Upravljanje znanjem u poljoprivredi" in Croatian), where he attended lectures, met experts in this area, and presented the Laboratory's project Specularia. As the Coordinator of the project, Matko talked about the use of robotics in agriculture and its potential future impact and uses in this field of economy and everyday life.
During the ERL Local Emergency Tournament in Seville, our AeRoTwin Project Coordinator Ivana Mikolić met with project partner CTA Aerospace Technical Officer Silvia de los Santos and consultant Marta Macías for the first AeRoTwin Short Term Visit, where she learned about the CTA model of innovation cluster and technological transfer. Ivana, Silvia and Marta visited the CTA facilities, talked to Silvia about their business and research strategies, and found out more about their equipment, projects etc. and visited the Advanced Center for Aerospace Technologies (CATEC). This was the first in a line of short-term management oriented visits which will help us improve our laboratory's R&D capacities during the project.
LARICS team members took part in the European Robotics League Emergency Local Tournament on 18-23 February in Seville, Spain, where they achieved amazing results - they won first place overall, as well as best ground team! During the five days of the competition, they worked hard on developing their ground and aerial robots, making them work together autonomously in various environments, and they even found the time to take part in the 1st AeRoTwin Training and 1st AeRoTwin Short Term Visit with project partners from the University of Seville and Technological Corporation of Andalusia. This hard work paid off and was rewarded with the great results they achieved. We would like to congratulate our colleagues for their efforts and achievments, and wish them even more success in the future! You can find a gallery from the tournament here.
This month we will be going to Seville, Spain, to take part in the European Robotics League Emergency Local Tournament 2019! Our team has been pre-selected for this competitive and interesting event, so we will have to combine our knowledge of ground and aerial robots to make them work together. They will have to be as autonomous as possible, capable of coordinating through both indoor and outdoor environments and will have to perform specific advanced tasks. We are working very hard for this competition and are looking forward to taking part in it!
On February 18 and 19, 2019, our team will be going to Seville to take part in the first AeRoTwin hands-on training with the title Drone Localization and Mapping. The training will be held at the Robotics, Vision and Control Group (GRVC ) Lab premises in Seville, Spain, and our lecturers are experienced members of this lab and the AeRoTwin project team, who will help us learn more about drone localization and mapping, the newest developed techniques and technology, the theoretical background and practical applications. You can find out more about the content of the training, the lecturers and related institution by following this link.
Our team's representatives, Matko and Stjepan, went to Spain to the beautiful city of Cáceres, where they will take part in the Kick-off meeting for one of our newest projects, ENCORE - ENergy aware BIM Cloud Platform in a COst-effective Building REnovation Context. There, they are meeting with the project partners and coordinators, and are discussing the plans for the project, their goals, ideas for the future, etc. Their main goal in the following years is to increase the share of renovated stock in Europe and worldwide by providing effective and affordable BIM tools that cover the whole renovation life-cycle. We wish them all a great start and successful project!
We have some great news for the final month of ADORE project! The paper entitled “Hierarchical POMDP Framework for a Robot-assisted ASD Diagnostic Protocol” has been accepted for oral presentation at the prestigious international conference ACM/IEEE International Conference on Human-Robot Interaction HRI 2019. The conference will be held on March 11-14, 2019 in Daegu, South Korea, and our dr. sc. Frano Petric will do the presentation.
On 16 January 2019, our professor Stjepan Bogdan took part in a TV show titled Treći Element (Third Element) on the Croatian National Television, where he discussed the ASSISIbf project with the guests and hosts, talked about what biomimetics is and how it can be applied, as well as how nature and robotics can work together. We would like to thank Treći Element for the invitation - you can watch the whole episode of the show by following this link (in Croatian).
The first edition of our DroneDays event is soon approaching, so the organizers of the event, Ivana Mikolić, Stjepan Bogdan, Matko Orsag and Frano Petric told us more about what visitors can expect at the workshop. We have published their interview at the DroneDays website and you can read it under detailed news content. Registrations for the event are now open - register by following this link!
DroneDays is a two-day workshop focused on unmanned aerial vehicles which will be held on 26th and 27th March 2019 at UNIZG FER premises in Zagreb, Croatia. The programme consists of keynote lectures, an exhibition area, as well as a flying zone, and is focused on unmanned aerial vehicle applications and end-user industries. It will serve as a meeting place for experts from the industry and academia, end-users, as well as regulatory bodies from the region.
Yesterday our Matko, Frano and NAO robot went to the Advent in Maksimir, where they took part in an art workshop titled "Overcoming the barriers of autism - together", organized by the Autism Association Zagreb, who we collaborated with on our recent Christmas charity event. During the workshop, visitors had the opportunity to meet members of the Association, see what they've been doing and take a look at the crafts they exhibited, as well as to get to know our NAO robot and learn about its role in diagnosing autism. You can read some more about the event here (in Croatian) and see some of the Association's photos here. We would like to thank the Association for the invitation and wish them a successful new year!
On Wednesday, 19th December, we held a fund-raising event for the Autism Association Zagreb, where the robots from our Laboratory worked together to serve the visitors with chocolate waffles, brownies and tea or mulled wine. This exciting event was visited by over 2000 people and some 700 orders were taken and served, which resulted in the amazing amount of over 13 thousand kuna (almost €2000) in donations, all of which will be given to the Autism Association Zagreb. We would like to give our gratitude to everyone who took part in this great event and wish everyone happy holidays!
We have an exciting announcement: the first edition of DroneDays, a two-day workshop focused on unmanned aerial vehicles and their end-users, will be held in Zagreb at our Faculty on 26th and 27th March 2019. The programme of the event will consist of keynote lectures, an exhibition area and a flying zone, and the event will serve as a meeting place for experts from the fields of industry and academia, end-users, as well as regulatory bodies from the region. We invite you to save the date for the first edition of DroneDays, as there is a lot in store for the event! For more up-to-date information, please visit the official DroneDays website.
The famous Christmas market in Zagreb has just become one interesting event richer: On Wednesday, 19th December, 10-16h, visitors of UNIZG-FER will have the opportunity to enjoy mulled wine, tea and brownies or waffles, which are special because they will be served by - robots! This unusual event is organized by us and the brand robotics@fer.hr with the goal of raising funds for the Autism Association Zagreb. We hereby invite you to join us at this unusual and exciting event!
Our colleagues from the Faculty of Education and Rehabilitation Sciences have published an article in the journal Croatian Review of Rehabilitation Research entitled “Reaction to Robots in Social and Non-Social Contexts - Comparison of Children with Autism Spectrum Disorders and their Typical Peers”. In this article they have described their experience gained through numerous sessions with a group of typically developing children and children diagnosed with ASD interacting with NAO robots. The article is accessible at the following open-access link.
Our members Matko and Frano, as well as Alumnus Tomislav Haus, will be representing robotics branch of technology and automation at the upcoming B:IT.con event, which will be held in Bjelovar, Croatia, on 15 December 2018. Matko and Frano are holding a presentation titled "Robots in service of mankind" and Tomislav will focus on the topic of "Autonomous mobile robots of the 4.0 industry".
LARICS members took part in the first AeRoTwin Innovation Management Training, organized in cooperation with the EXCELLABUST project and held on 5-7 December 2018 at our faculty in Zagreb. We learned a lot about H2020 projects, how to manage them, what expert profiles are, how R&D management works in a big company and how to choose the right calls for our EU projects. We would like to thank all the speakers, especially our AeRoTwin project partners, and we hope to see them again soon! You can take a look at the gallery of the event by following this link.
As part of our AeRoTwin project, next week we are hosting an Innovation Management Training, the first as part of the project. The title of the event is "EU and Business R&D Project Management", and it will be held 5th to 7th December, 2018, at our Faculty. The goal of the three-day training is to gain a better understanding of EU projects, proposals, and calls, as well as the tools used to manage them, with special focus on Horizon 2020 projects. The training will be led by four speakers: Vesna Torbarina from the Croatian Chamber of Economy, Manuel Jiménez Díaz from the Morera&Vallejo Group, Silvia de los Santos from the Technological Corporation of Andalusia and Matko Barišić from ABB AS Norway.
The full agenda can be found at this link.
For this year's European Robotics Week, we participated in two events in Zagreb - the University of Zagreb Fair (22nd to 24th November) and University of Zagreb Faculty of Electrical Engineering Open Day (24th November) with the brand robotics@fer.hr and together with two more robotics laboratories from our faculty - LABUST and LAMOR. Both the events were very successful!
During the week from the 19th to the 23rd of November, 2018, the AeRoTwin Project Coordinator Yiannis Vacondios was in Zagreb for a study visit organized by the European Commission to learn more about Croatian ministries and institutions, and to explore the impact joining the European Union has so far had on Croatia. We used this chance to meet with him for lunch on Friday, 23rd November, and discuss current ideas and plans for the project, as well as what we have in store in the future of the project.
Prof. Zdenko Kovačić was invited by the partners of the RONNI project to give a presentation about the ADORE project at the Strategic Workshop Increasing the Well-being of the population by R&ICT-based Innovative Education that was held in the popular Bulgarian ski resort Bansko. The aim of the workshop was to bring together experts from several European countries in order to exchange ideas leading to possible scientific collaboration on future joint projects.
On Friday, 23rd of November, at the Faculty Day ceremony, our prof. Zdenko Kovačić received an award for the promotion of our faculty and the University in the scientific community, connecting with the industry, and his hard work in the area of automation and robotics through the years. This award serves as a confirmation of all his efforts during the years he spent at the faculty and in LARICS. Congratulations to professor Kovačić, we wish you many more successful years!
Our two project managing team members, Ivana and Anamarija, went to an Innovation Management Training event at our Faculty on Friday, 16th November, organized by our colleagues from LABUST with the title "Disruptive Business Models and cracking the code of Financial Forecasting". The training was held by Helena Deane from WestBIC, Ireland, and she taught the attendees about what disruptive business models are, why they are important and how they could be applied in the context of our scientific efforts.
On Thursday, 15th November, our lab members and PhD students attended a workshop by the Croatian Science Foundation (HRZZ) as part of the institution's project that aims to further develop the careers of young researchers and PhD students in Croatia. At the workshop, they learned about what their possibilities and duties are, how they file reports, work with the system etc. They learned a lot and are looking forward to more such initiatives in the future!
On November 15, 2018, our members Matko Orsag and Ivana Mikolić took part in the daily tv programme "Dobro jutro, Hrvatska" (Good morning, Croatia, Croatian Radiotelevision) as guests, where they talked about the European Robotics Week 2018 and how it will be manifested here. Matko is the National Coordinator for the Robotics Week and together with Ivana, his assistant for this event and LARICS project coordinator and manager, they talked about the events organized in Croatia.
Our new robotic arm for the project Specularia has recently arrrived at our Lab! This is great news for the project, as it means that our colleagues will now be able to continue working on new research and ideas. This compliant multi-degree-of-freedom manipulator has the task of performing delicate handling of plants, such as flower and fruit manipulation, and plant pruning. It will work together with two more robots in a robotic system which consists of the arm, an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV). Together, they will be able to accomplish many things!
Our member Matko Orsag, coordinator of the Specularia project, took part in a conference organized by the Croatian Innovator Association, together with the Nikola Tesla Innovation Center. The conference with the title "Smart agriculture - use of the technologies in agriculture" was held on October 18, 2018 in Zagreb. Matko Orsag held a presentation entitled "Autonomous Robots in Indoor Agriculture", presenting the new ideas and concepts developed and worked on as part of the Specularia project and LARICS' research. Further details on the conference can be found by following this link, whereas Marko's presentation can be seen its entirety here.
Our Lab will be taking part in ERW 2018 under the robotics@fer.hr brand, together with our colleagues from LABUST and LAMOR! We will attend the University of Zagreb Fair (22-24 November) and present our work, equipment, projects, as well as opportunities for potential undergraduate, graduate and PhD students, researchers, teachers etc. We will also open our labs to the public during the Open Day event at our Faculty (24th November) and will show the visitors what it is like to work in our three laboratories. We are looking forward to these events and hope to see you there!
As is tradition, another LARICS seminar was held, this time in the wonderful Sisak-Moslovina County. The seminar was held from 19th to 21st October, and in this time we had a lot to do: The Laboratory's new members introduced themselves, as did the new Alumni, and an overview of the current and planned projects was given in the scientific part of the seminar. But we didn't just work - we had a social programme, too!
On October 10th, 2018, an interview by our professor Stjepan Bogdan was published in the local business weekly, Lider. The article is titled "FER-scientists are not 'lost in translation', even when translating the language of fish to bees", and in the interview, prof. Bogdan talked about all things ASSISIbf - he explained what exactly the project was about, how the various experiments with bees and fish were conducted, what technology was used and how it was done, what our Faculty's role was in all of this, and finally what results were found and what conclusions were made during the project. You can find the whole interview (in Croatian) by following this link.
On Thursday, October 18th, 2018 Prof. Bogdan and Prof. Kovačić attended the 3rd International Workshop on Advanced Cooperative Systems at our Faculty. The Workshop was organised by ACROSS and DATACROSS, with the intention of bringing together Croatian and international researchers and industry professionals who have an interest in strategic research domains of robotics, big data technologies, renewable energy sources, and control methods.
Prof. Stjepan Bogdan and Ivana Mikolić, who are the coordinators of our new project AeRoTwin, are currently in Brussels attending the TWINNING Coordinators Day organized by the European Commission. They will attend presentations, meet experts in this area and learn a lot about how they can work on and improve the project in the future. They also used this opportunity to meet the AeRoTwin Project Officer in Brussels.
On 15th October, prof. Stjepan Bogdan and Matko Orsag presented five new projects developed in our Lab at the scientific symposium “New research projects at UNIZG-FER”. They presented recently started projects: AeRoTwin, ENCORE, MBZIRC, SPECULARIA, and ENDORSE. At the symposium, the emphasis was put on the possibilities for cooperation with economic operators, as well as job opportunities on projects from young professionals and experienced researchers.
Our professor Stjepan Bogdan went to the AI2FUTURE conference, which was held on 11th and 12th October 2018 at the Algebra LAB in Zagreb, Croatia. He was an invited lecturer and held a presentation titled "Swarm Intelligence in Animal and Robot Societies" based on the recently finished ASSISI project, the research was done as part of it and the findings of the project. We hope to take part in this and other such conferences in the future, too!
Our project for the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) has officially started with the kick-off meeting being held on 12th October 2018 at our Faculty. The meeting was led by our Frano Petric, who is also the head of this project, and many of our staff and researchers attended it to discuss current and future plans for this competition and for the European Robotics League (ERL), which we will also be taking part in soon. Best of luck to our colleagues at both competitions!
Continuing with the trend of the Lab being very active, we went to Biograd na Moru in Croatia, where the tenth (birthday!) edition of Breaking the Surface, an international interdisciplinary field workshop of maritime robotics and applications, was held from 30th September until 7th October. Our members went to lectures, visited demonstrations, took part in tutorials, visited a workshop and let's not forget - partied ;) Check us out at the Great Gatsby Party and Karaoke Party!
Our hardworking members went to Madrid to attend another International Conference on Intelligent Robots and Systems (IROS) to present their own and the Lab's work. Five of our members, Matko Orsag, Marsela Polić, Frano Petric, Marko Car, and Antun Ivanović were in Spain from 1st to 5th October and actively participated in the conference.
It's been a very active time for our Lab, as our Lab members went to Rijeka, Croatia, from 28th to 30th September 2018, to present our work and our particularly equipment at the Rijeka Nautic Show as part of our new AeRoTwin project. Three of our colleagues were there, prof. Stjepan Bogdan, Marko Car and Lovro Marković, and they presented the UAV designed during the MORUS project.
Our Lab will implement our newest methods and algorithms for our new project, the Mohamed Bin Zayed International Robotics Challenge (MBZIRC)! The leader of this project for LARICS is our Frano Petric. This is a competition where the contestants meet with various demanding problems in robotics, which means that it is a great chance for our team to develop new technology and solutions, which will be presented at the competition itself, to be held in 2020. in Abu Dhabi.
The Kick-off meeting of our new project, AeRoTwin, was held on September 26th, 2018 in Zagreb, at our Faculty. The meeting was attended by our Lab members, partners working on the project from the University of Seville, Imperial College London and the Technological Corporation of Andalusia, as well as a member of the Advisory Board - there was a lot to talk about!
As announced, dr. Mirko Kovač from the Imperial College London held a presentation with the title "Bioinspired Aerial Robots for Infrastructures", as part of our new project AeRoTwin, where he described his previous and current work in this area, as well as what might be in store in the near future. The invited lecture was attended by many of our students and staff and they learned a lot, asked questions and found out more about this incredibly interesting area of robotics. The gallery of the lecture can be found here. Thank you, dr. Kovač!
Our Prof. Stjepan Bogdan, Ivana Mikolić and Marsela Polić went to Brussels on 22-25 September to attend the final review meeting for the ASSISIbf project. ASSISI started five years ago and is the last FP7 project at the Faculty of Electrical Engineering and Computing, as well as the financially biggest one. At the meeting, the project was discussed in detail and the final review was a success. Congratulations to all the participants!
As per the law and according to the decision made by the Rector's Conference, our dr. sc. Tamara Petrović will be holding her first, inaugural Lecture at the Faculty on 1st October, 2018, starting at 3PM. This is the final step of the process of her becoming a member of the teaching faculty here at FER. The lecture will be held in the room D160 as part of the course Control System Elements. The topic of the lecture will be The role of elements in a control system.
All interested parties are welcome at the lecture!
On Tuesday, September 18th, our Prof. Kovačić and Prof. Bogdan, together with colleagues from Danieli Automation, visited the Pittini plant in Italy as a part of the initiative to introduce autonomous UAVs in the process of a rolling-mill facility status inspection. There they went on a tour of the plant and had a meeting to discuss the details of a future cooperation. Initial flights of the UAV, which should confirm the feasibility of the initiative, are planned for the beginning of November.
The H2020 project "Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin" and Laboratory for Robotics and Intelligent Control Systems - LARICS invite you to the lecture: "Bioinspired Aerial Robots for Infrastructures" by Mirko Kovač, Imperial College London, which will be held on 27th September 2018 at 09:00 in the Seminar Room of the Department of Control and Computer Engineering on the 9th floor of the Faculty of Electrical Engineering and Computing, Zagreb, Croatia.
More about the speaker and the talk can be found in the detailed news content or here.
Our professor Zdenko Kovačić attended the 26th International Conference on Software, Telecommunications and Computer Networks (SoftCOM 2018), which was held in Supetar-Split, Croatia, where he presented the paper entitled “Object Classification for Child Behavior Observation in the Context of Autism Diagnostics Using a Deep Learning-based Approach”. The paper brought to attention the results of a LARICS student, Mihael Presečan, which demonstrate the effectiveness of a deep learning approach for object detection and classification using a mono-vision feedback of a NAO humanoid robot for assessing a child’s behavior during free play with standardized toys, which is one of the tasks contained in the standard ADOS-2 autism spectrum disorder diagnostic protocol used by clinicians.
Our Marsela Polić was at the 11th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles - CAMS, in Opatija, Croatia, 10th-12th September. There she presented a paper entitled "Compliant net for AUV retrieval using an UAV", which was co-authored by Antun Ivanović, Marsela Polić, Omar Salah, Matko Orsag, and Stjepan Bogdan. The research for the paper was done as part of the MORUS project, funded by NATO's Emerging Security Challenges Division in the framework of the Science for Peace and Security Programme.
Our Lab members, specifically Prof. Stjepan Bogdan, Karlo Griparić (a LARICS Alumni) and Marsela Polić went to Linz in Austria from the 6th to the 10th of September, 2018. There they took part in this year's Ars Electronica Festival and presented the ASSISIbf project they've been working on. Our team conducted experiments with bees, fish and robots, all of which were developed as part of the project. This is the second time ASSISI has been presented at Ars Electronica, the first being in 2016.
LARICS is the coordinator of a new project: Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin, part of the H2020 Twinning programme. AeRoTwin is a coordinated twinning action aiming to spread excellence in aerial robotics. The partners on this project are the Imperial College of London, the University of Seville and the Technological Corporation of Andalusia.
The project Structured Ecological CULtivation with Autonomous Robots In Agriculture - SPECULARIA is a new five-year-long project that deals with concepts of compliant robot control, soft robotics, and heterogeneous robotic system and utilizes them to help farmers in indoor organic agriculture. The project is sponsored by the Croatian Science Foundation. The project has started on June 1st, 2018.
LARICS is a partner in a new Horizon 2020 project - ENCORE. The main objective of the project (ENergy aware Building Information Modelling (BIM) Cloud Platform in a COst-effective Building REnovation Context) is to increase the share of renovated stock in Europe and worldwide by providing effective and affordable BIM tools that cover the whole renovation life-cycle (from data collection to project execution, and commissioning/delivery). ENCORE will provide continuous monitoring of the energy consumption to ensure the non-degradation of the renovation works.
Dr. sc. Frano Petric attended the 26th Mediterranean Conference on Control and Automation, held on June 19-22, 2018 in Zadar, Croatia, where he presented the paper entitled “Classification of Child Vocal Behavior for a Robot-Assisted Autism Diagnostic Protocol”. The paper contained the results of a group of people including two LARICS students - Mirko Kokot and Ivan Bejić. The main contribution of the paper is an empirically determined minimal set of sound features, which allow efficient vocal behavior classification of preschool children, relevant in the context of autism diagnostics.
The half-day workshop on Assistive Technologies for People with ASD and other Disabilities held at the MED'18 Conference in Zadar, Croatia, brought together top experts - trainers from the field of robotics, information technology, human-robot interaction, rehabilitation and other related areas from France, Luxembourg, Serbia, Slovenia and Croatia. The keynote speaker was the famous European roboticist Alexandre Mazel who is a Software Innovation Director at Aldebaran - Softbank Group, Paris, France. Prof. Zdenko Kovačić gave a presentation about the ADORE project while Dr. Frano Petric presented the latest results stemming from his doctoral dissertation. Prof. Sanja Šimleša presented the results of ADORE from the clinician’s point of view. More information about the workshop program can be found at this link.
Four of our current and alumni members have successfully defended their doctoral dissertations and received their Doctor of Science degrees in Electrical Engineering.
Goran Vasiljević defended his thesis titled "Highly accurate markerless localization of mobile robots in indoor industrial environments" on October 24, 2017.
Ivica Draganjac became a Doctor of Science on February 2, 2018, with his successful defense of the thesis titled "Decentralized control of free ranging automated guided vehicles in industrial environments".
Frano Petric defended his thesis "Robot-assisted autism spectrum disorder diagnostics using partially observable Markov decision processes" on March 29, 2018.
Karlo Griparić became our latest Doctor of Science on April 5, 2018, upon successful defense of his thesis "Decentralizirani višeagentski sustav za interakciju sa zajednicom pčela zasnovanu na algoritmu konsenzusa".
Congratulations to all of them!
On March 29, 2018 LARICS researcher Frano Petric successfully defended his doctoral dissertation and received a Doctor of Science degree in Electrical Engineering. Frano’s thesis was entitled “Robot-assisted Autism Spectrum Disorder diagnostics using Partially Observable Markov Decision Processes”. Frano will continue his research work within the ADORE project until January 2019. Congratulations!
The results of work done by LARICS researcher Dr. sc. Frano Petric and his coauthors on autism disorder observation with a robot evaluator have been published in the International Journal of Humanoid Robotics (World Scientific) in the article entitled “POMDP-Based Coding of Child–Robot Interaction within a Robot-Assisted ASD Diagnostic Protocol”. The existing procedures for autism spectrum disorder (ASD) diagnosis are often time consuming and tiresome both for highly-trained human evaluators and children, which may be alleviated by using humanoid robots in the diagnostic process. Hence, this paper proposes a framework for robot-assisted ASD evaluation based on partially observable Markov decision process (POMDP) modeling, specifically POMDPs with mixed observability (MOMDPs). POMDP is broadly used for modeling optimal sequential decision-making tasks under uncertainty. The article is accessible at the following IJHR link.
Dr. sc. Frano Petric attended the 2018 ACM/IEEE International Conference on Human-Robot Interaction held in Chicago, USA, where he presented a poster entitled “No data? No problem! Expert System Approach to Designing a POMDP Framework for Robot-assisted ASD Diagnostics”. The poster contained a discussion about the clinical tests of an improved robot-assisted diagnostic protocol with a group of children with ASD, which has drawn the attention of HRI 2018 reviewers who suggested to include Frano’s work into the session entitled Late-Breaking Reports.
FER Day was held at XV. gymnasium (MIOC) in Zagreb on March 2nd to introduce the school’s students to activities and laboratories at FER. LARICS was presented with a booth where we had a NAO robot performing its usual dance routine and waving the audience, and a Pioneer demonstrating its SLAM abilities to the students. Our colleagues from LABUST presented the subCULTron project with an aPad and two aMussels, bringing attention to another aspect of robotics.
Together with Laboratory for Underwater Systems and Technologies (LABUST) and Laboratory for Autonomous and Mobile Robotics (LAMOR), we were a part of our Faculty’s display at this years University Fair, which was held in the Student Centre from November 23-25, 2017.
The event was aimed towards high school students which were able to see a small part of our robotics research, including our newly acquired robot Pepper, aPad platform from LABUST and Husky platform from LAMOR, all presented under our robotics@fer.hr brand.
On November 23, 2017 our LARICS researcher Tomislav Haus successfully defended his doctoral dissertation entitled “Control of multirotor unmanned aerial vehicle based on moving mass concept”.
The LARICS part of the MORUS team spent a week in a military base in Udbina preparing the MORUS aerial vehicle its first take off. Stjepan Bogdan, Matko Orsag, Tomislav Haus, Antun Ivanović, Marko Car were preparing the aerial vehicle powered by four internal combustion engines for its first flight.
LARICS participated in a Knowledge Thursday lecture with Croatian Telecom (HT) and Bokamobile, where we learned about using robotics for promotional purposes. We also held a presentation of our own about the technical background of robotics and described our work and activities.
We were once again invited to participate in the Intellectual property day for children and youth, organized by Intellectual Property Office of the Republic of Croatia with the support of the European Union Intellectual Property Office. This time the event was held in Varaždin City Hall on November 14th, 2017.
At this year’s Breaking the Surface workshop LARICS and LABUST researchers demonstrated the functionality of the underwater heterogeneous swarm developed within the project subCULTron. This demonstration gained a lot of attention, and we got many interesting questions and ideas from attendees.
Prof. Zdenko Kovačić and Frano Petric were guests in the radio show "Znanstveni koncentrat” (Scientific concentrate) of the Croatian National Radio 1 (Hrvatski radio 1. Program). They answered questions about and discussed the purpose, methodology and significance of our ADORE project for the broader population with ASD.
Almost at the end of the development phase of our collaboration with Croatian Telecom and Bokamobile, we deployed Croatian Telecom’s Pepper robot in two real-world scenarios during the Weekend Media Festival, held in Rovinj, Croatia on September 21-24, 2017.
On September 15, 2017 the subCULTron consortium jointly presented the subCULTron project as “the world's largest diving robot test” in the waters of the Venice lagoon, at the Venice Arsenal. This was the first time that journalists and the public had the opportunity to see our project in action. Journalists from all over Europe participated in the event and transmitted the news about the project. Euro news' feature on subCULTron can be found here.
Frano Petric attended the 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2017) held in Lisbon, Portugal, on 28 to 31 August 2017, where he presented a paper titled “Functional Imitation Tasks in the Context of Robot-assisted Autism Spectrum Disorder Diagnostics: Preliminary Investigations”. In this paper, instead of pure motoric imitation, imitation tasks involving real objects in the environment are proposed. The introduction of physical objects strongly emphasizes joint attention skills, another area that is typically impaired in children with ASD. Furthermore, simple object detection, manipulation, tracking and gesture recognition algorithms, suitable for real-time, onboard execution on the small-scale humanoid robot NAO were presented.
At the end of July 2017, an “Assembly Workshop” for the project subCULTron was held at the Faculty of Electrical Engineering and Computing, with two laboratories from Zagreb participating – LARICS and LABUST.
LARICS Phd student Tomislav Haus spent four weeks (mid June to mid July 2017) at the United States Military Academy at WestPoint, NY, as a part of their summer internship program.
LARICS researcher Tamara Petrović participated in the 20th World Congress of the International Federation of Automatic Control (IFAC 2017 World Congress), which was held in Toulouse, France from 9 to 14 July 2017.
On July 17, 2017 LARICS researcher Edin Kočo successfully defended his doctoral dissertation and received a Doctor of Science degree in Electrical Engineering. Edin’s thesis was entitled “Hybrid compliance control and feet trajectory optimization for a bioinspired quadruped robot”.
Our colleague Ante Zglav visited the Ford research center in Aachen to collaborate on project ADELE. The project's goal is to provide an automatic tuning and extension method for a model of a diesel Lean NOx trap (LNT) catalyst using test data.
We were invited to participate in the Intellectual property day for children and youth, organized by Intellectual Property Office of the Republic of Croatia with the support of European Union Intellectual Property Office and held on May 30 in the Museum of Modern Art in Zagreb.
LARICS Phd student Tomislav Haus attended the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), held in Miami, FL, USA, June 13-16. Tomislav presented the paper titled “A concept of a non-tilting multirotor-UAV based on moving mass control“.
Our members attended the TEDx event at Vatroslav Lisinski hall in Zagreb, where they presented a collection of wheeled and legged mobile robot platforms developed within the laboratory at the Faculty booth. The goal of the event was to share ideas and experiences mainly in the STEM area and it featured a large number of distinguished presenters.
IEEE Croatia Section, Robotic and Automation Department and ZCI-ACROSS organized the lecture “Design of wearable IMU sensors-data fusion for a user-friendly mobility assistive device” which was held by Dr. Omar Nour, Post doctor at LARICS.
Our PhD student Marko Filipović who has a background in inustry (Croatian company HS product) successfully defended his PhD Thesis at the University of Zagreb, Faculty of Electrical Engineering and Computing on April 11th, 2017. Marko’s supervisor was prof. Stjepan Bogdan and the PhD thesis is entitled “Robot Workstation Failure Recovery Strategy based on Treatment Quality and Resource Failure Matrices”. Congratulations Marko!
Our NAO robots were a part of our Faculty booth at the office of the President of the Republic of Croatia, Kolinda Grabar-Kitarović. We were honored to be a part of the “Open-doors day for STEM fields popularization”. While we were taking pictures, one of our robots decided to grab a few STEMI minions and take control over the President’s chair!
LARICS participated in DRONEfest 2017, presenting our recent results in collaborative projects EUROC and MORUS. The presentation included both a live demo of wind turbine inspection, the work completed under EUROC project, as well as a display of the MORUS UAV. Matko Orsag gave a talk titled “Heterogeneous robotic systems for inspection and interaction with the environment”.
Together with our colleagues from LAMOR and UNIDU, LARICS successfully completed a demonstration of our Blade capture system for autonomous wind turbine inspection. This project has been supported by the EU-FP7-ICT project European Robotics Challenges (EuRoC).
LARICS researchers visited the production facilities of the Croatian company Cromaris, which is one of the leading companes in the aquaculture sector in Croatia and the Adriatic Sea.
Our Frano Petric attended the 2017 ACM/IEEE International Conference on Human-Robot Interaction held in Vienna, Austria, on March 6-9, 2017, where he presented the poster entitled “Robot-assisted autism spectrum disorder diagnostics using POMDPs”. The poster contained the description of the proposed research aimed towards developing models for control and assessment of child-robot interaction within a robot-assisted autism spectrum disorder diagnostic protocol. Although the poster contained only preliminary information, it was recommended by the HRI reviewers to be included in the HRI PIONEERS 2017 Workshop.
LARICS was featured in Treći element, a popular science talk show, on March 2nd. In a 45-minute show, hosts of the show were joined by our professors Stjepan Bogdan and Zdenko Kovačić in the studio where they gave insights on some of the burning questions the general population might have about robotics. The show also incorporated the footage from the robotics laboratories at FER (LARICS, LABUST, LAMOR) where researchers demonstrated and elaborated on their work.
Project MORUS 2nd Workshop and General Assembly were held at FER from February 2nd to 10th 2017. All partners in the project participated in the preparation and execution of this workshop. The goal of the MORUS project 2nd workshop was twofold: first, UAV roll and pitch control loops, implementing a moving mass concept, were tested, together with the low-level state machine. Second, the integration of the Human Machine Interface with a high-level state machine and overall system communication have been done.
LARICS PhD student Karlo Griparić mentored by Prof. Stjepan Bogdan, in front of the assessment committee (Prof. Stjepan Bogdan, Prof. Zdenko Kovačić and Prof. Mladen Crneković), successfully defended the topic his doctoral dissertation titled “Decentralized multi-agent system for interaction with a honeybee society based on a consensus algorithm”. The committee agreed about the expected contributions and therefore the Faculty Council and the Technical Committee of the University of Zagreb approved the given topic proposal.
LARICS was presented in this year’s Night of Museums as a part of the program in the Croatian Academy of Sciences and Arts (HAZU) library. Our dancing Nao robots demonstrated their capabilities to the audience, some of them were even reading texts from HAZU’s digital collection.
LARICS and LABUST organized an H2020 project subCULTron workshop titled “stress test workshop” at UNIZG FER on 9 – 13 January 2017 with all project partners representatives. The overall goal of the workshop was to feature freeze new electronic design for the mass production of 100+ aMussel units. Extensive testing on three newly produced aMussels in the pool as well as out of it validated the design and provided us with the data to make minor adjustments before taking the next step.
The first Croatian FIRST LEGO League was held at FER on January 14th 2017. The league has been held for 18 years and in 80 countries around the world, and thanks to the organization of Croatian Robotic Association, Croatia is one of them. During the opening ceremony, our NAO robot performed one of his distinctive dances and wowed the audience.
Barbara Arbanas attended the “Lucia 2016 – 3nd PhD school on Artificial Intelligence and Robotics”, held in Örebro, Sweden on December 12-16, 2016. The school provided a unique training and human experience. The lecture topics covered technologies at the forefront of research in AI and in Robotics, while some of these were applied through hands-on exercises on real robots. The winter school was also an opportunity to discuss our research with top-level scholars, as well as other students, and to extend networks. Barbara also presented project subCULTron in an interactive poster session.
Before the assessment committee (Prof. Matko Orsag, Prof. Stjepan Bogdan, and Prof. Zdravko Terze), LARICS PhD student Tomislav Haus mentored by Prof. Bogdan successfully presented and defended the topic of his doctoral dissertation titled „Control of multirotor unmanned aerial vehicle based on moving mass concept“. The Committee agreed upon expected scientific contributions and thereafter, the Faculty Council and the Technical Committee of the University of Zagreb approve the given topic proposal.
LARICS researcher Edin Kočo spent one month in Armenia with the Croatian company HRID d.o.o. He was involved in inspection tasks of reactor pressure vessel (VVER-440) in Metsamor nuclear power plant located near capital city Yerevan. During his visit to Armenia, Edin provided software support during the inspection process for any unexpected problems that arose during the inspection.
Prof. Stjepan Bogdan attended on the 7th ASSISI General Assembly meeting in Lisabon, held on October 26th 2016. Prof. Bogdan presented the work done by LARICS team, including the developed interactive arena, visual bee tracking software, bee density estimation by neutral network and results obtained in the successful cooperation between honeybee society and multi-agent system based on consensus algorithm.
LARICS researchers participated in LARICS seminar, held October 8-11, 2016, that was jointly organized with KoREMA. Senior members presented an overview of results and on-going tasks of LARICS projects. Plans for next year research activities in LARICS were discussed. As a part of the seminar social program LARICS team visited Šibenik.
LARICS researchers participated in interdisciplinary field workshop on maritime robotics and applications - Breaking the Surface 2016 in Biograd na Moru, Croatia. Prof. Stjepan Bogdan gave an invited lecture titled “Unmanned system for maritime security and environmental monitoring“. As a part of demonstrations, LARICS researchers participated in a presentation of two projects – subCULTron (dr.sc. Tamara Petrović and Barbara Arbanas) and MORUS (dr.sc. Matko Orsag and Tomislav Haus). Both presentations were well attended and researchers from all over the world expressed interest in hardware and software developed in LARICS.
Our Frano took part in the Fifth Croatian Computer Vision Workshop, held on October 11, 2016, in Osijek. Frano presented his work titled “Probabilistic Eye-Contact Detection for the Robot-assisted ASD Diagnostic protocol”, done within the ADORE project. We would like to thank Visage Technologies for providing us with their face-tracking software.
Before her lecture on non-visual access to mathematical contents, professor Silvia Fajardo Flores from the University of Colima – Faculty of Telematics, Mexico, visited our ACROSS laboratory and met our humanoid robots. She also took some time to talk to professor Kovačić about our work with the children with autism and exchange some ideas about the potentials of using robots to help visually impaired people.
In order to be able to show more of our important work to the public, we have finally made a Facebook page and Twitter profile. Check us out, like, follow, comment! Since we like control, we also like feedback.
In front of the assessment committee (Prof. Stjepan Bogdan, Prof. Zdenko Kovačić, and Prof. Bojan Jerbić), LARICS PhD student Frano Petric mentored by Prof. Kovacic successfully presented and defended the topic of his doctoral dissertation titled „Robot-assited Autism Spectrum Disorder Diagnostics using POMDPs“. The Committee agreed on the expected scientific contributions and following this decision, the Faculty Council and the Technical Committee of the University of Zagreb should approve the given topic proposal.
In front of the assessment committee (Prof. Stjepan Bogdan, Prof. Zdenko Kovačić, and Prof. Mladen Crneković), LARICS PhD student Edin Kočo, mentored by Prof. Kovačić, successfully presented and defended the topic of his doctoral dissertation with the title „Control of four legged robots based on biologically inspired mechanical and control characteristics and evolutionary learning“. The Committee agreed upon the expected scientific contributions and, following this decision, the Faculty Council and the Technical Committee of the University of Zagreb should approve the given topic proposal.
The subCULTron team had yet another successful workshop and general assembly in the first week of September 2016. This workshop was dedicated to reliability testing of the first batch of ten aMussels. The workshop was held at the Brodarski Institute, Zagreb. The main focus of this workshop was to prepare for the upcoming review and to identify possible weaknesses. Various tests, such as autonomous docking, diving, interacting with humans via SMS, twitter etc. were conducted and showed very encouraging results.
The local news portal Zg-Magazin published a story about our ADORE project. Our Damjan Miklić was interviewed about the project, the NAO robots, the project's results so far, the team working on it etc. You can read the full story here.
As a member of the European Control Association's (EUCA) General Assembly, Prof. Stjepan Bogdan attended the meeting which was held during the 2016 European Control Conference, that took place in Aalborg, Denmark. As a part of the Unmanned Aerial Vehicles session at ECC2016, Prof. Bogdan presented his paper titled “Human-in-the-Loop Control of Multi-Agent Aerial Systems”.
A MORUS project internal workshop was held from 20th to 24th June 2016 at the Faculty of Electrical Engineering and Computing. The main purpose of the workshop was transferring knowledge among project partners, as well as integrating developed software modules, particularly the system state machine, models for the Gazebo simulator and communication modules. On Thursday, 23rd of June, the project partners visited lake Jarun, where the LABUST team demonstrated unmanned underwater vehicle behavior in the real world conditions.
We are pleased to announce that the book chapter “Trajectory Planning Based on Collocation Methods for Adaptive Motion Control of Multiple Aerial and Ground Autonomous Vehicles” co-authored by S. Vera, F. Petric, G. Heredia, A. Ollero, and Z. Kovačić has just been published in the book Control of Complex Systems, Editor(s): K. G. Vamvoudakis and J. Sarangapani, Elsevier Inc., pp. 575-624, 2016 (available on-line: DOI:10.1016/B978-0-12-805246-4.00001-X).
Three LARICS researchers and PhD students attended the 24th Mediterranean Conference on Control and Automation, which took place on 21-24 June 2016 in Athens, Greece. Goran Vasiljević presented the paper “Model predictive control based torque vectoring algorithm for electric car with independent drives” by G. Vasiljević and S. Bogdan. Edin Kočo gave a presentation of the paper “Multiobjective locomotion optimization of quadruped robot with different 2DOF configurations of actuated spine” by E. Kočo and Z. Kovačić. Finally, Tomislav Haus presented the paper “A novel concept of attitude control for large multirotor-UAVs based on moving mass control” by T. Haus, N. Prkut, K. Borovina, B. Marić, M. Orsag and S. Bogdan.
Prof. Zdenko Kovačić and Frano Petric participated as presenters at the Conference on Education, Innovation and Enterpreneurship organized by the Technical College in Bjelovar, Croatia. Prof. Kovačić held a lecture entitled “Autism and autism diagnostics with a robot evaluator”. Frano conducted a demonstration workshop “A robot as a friend”.
We are pleased to announce that the book chapter “Harmonization of Research and Development Activities Toward Standardization in the Automated Warehousing Systems” co-authored by Z. Kovačić, M. Butler, P. Lista, G. Vasiljević, I. Draganjac, D. Miklić, T. Petrović, and F. Petric has been just published in the book Autonomous Industrial Vehicles: From the Laboratory to the Factory Floor.
LARICS participated in the the 11th annual Croatian Exporters ceremony with two NAO robots opening the program as presenters. Our friends from LAMOR joined us with their Kinova Jaco arm, which revealed the Golden Key awards for the best exporters and handed out the envelopes with awardee names. The ceremony took place in the Crystal Ballroom of the Westin hotel in Zagreb.
In front of the assessment committee (Prof. Stjepan Bogdan, Prof. Zdenko Kovačići, and Prof. Ivana Palunko), LARICS PhD student Goran Vasiljević mentored by Prof. Kovačić successfully presented and defended the topic of his doctoral dissertation titled „High precision markerless localization of mobile robots in indoor industrial environments“. The Committee agreed upon the expected scientific contributions and following this decision, the Faculty Council and the Technical Committee of the University of Zagreb should approve the given topic proposal.
On May 23rd, Jutarnji list, one of the most prominent Croatian newspapers, published an article about the subCULTron project. Featured on the front page, it includes an extensive interview with our Prof. Stjepan Bogdan and Asst. Prof. Nikola Mišković from the Laboratory for Underwater Systems and Technologies, LABUST. The article provided a great visibility boost to the project and yielded many positive reactions. Other LARICS members working on the subCULTron project are Tamara Petrović, Goran Vasiljević and Barbara Arbanas.
Matko Orsag, Tamara Petrović, Edin Kočo, Tomislav Haus, Karlo Griparić, Antun Ivanović, Marko Car and Barbara Arbanas attended the IEEE International Conference on Robotics and Automation ICRA 2016. The conference was held on May 16-21, 2016 at the Stockholm Waterfront Congress Centre in Stockholm, Sweden. Barbara Arbanas presented the paper “Aerial-ground robotic system for autonomous delivery tasks” that she co-authored with Antun Ivanović, Marko Car, Tomislav Haus, Matko Orsag, Tamara Petrović and Stjepan Bogdan.
One of the key components in the interaction of NAO robots and children is a vocal communication. In the protocol for diagnostics of autism adapted for NAO robots, tasks like Call by name require communication in the Croatian language. NAO robots speak French and English fluently, but they do not speak Croatian. This is the reason why Prof. Kovačić, Dr. Damjan Miklić, and Frano Petric gladly accepted an invitation to visit the laboratories of the Technical Faculty in Novi Sad and the company Alfanum, a regional leader in speech communication technologies.
The paper “New Variable Passive-compliant Element Design for Quadruped Adaptation to Stiffness-varying Terrain”, written by Edin Kočo, Alan Mutka and Prof. Zdenko Kovačić, is now available online in the International Journal of Advanced Robotic Systems. The paper presents the design of a novel variable passive-compliant (VPC) element utilized as a lower-leg implant of a fully electrically driven quadruped robot. It is designed as a slider-piston mechanism which ensures that the force produced during foot-ground contact is directly perpendicular to the contact surface of an actuated revolute spring.
Paper “High-accuracy vehicle localization for autonomous warehousing”, written by Goran Vasiljević, Damjan Miklić, Ivica Draganjac and prof. Zdenko Kovačić will be published in the Robotics and Computer-integrated Manufacturing journal. The paper presents the algorithm stack for high-precision autonomous vehicle localization, developed within FP7 EC-SAFEMOBIL project. The proposed methodology satisfies the industrial requirements for localization accuracy and has been verified by extensive experiments in realistic industrial conditions. Full paper can be accessed via the following link, which will be available until July 3, 2016.
Prof. Zdenko Kovačić, Goran Vasiljević and Edin Kočo participated in the kick-off meeting of the new LARICS project ADELE organized in the Ford Research Centre in Aaachen. This was the opportunity to introduce our side better and to discuss the first steps to be taken in the project with our partners from Ford.
Job Fair is a career fair organized by the student association KSET and FER, and from the students' perspective, it is a unique opportunity to meet potential future employers. This year, our Faculty was also present as an employer, offering a number of vacant positions, from doctoral to postdoctoral. Since our postdoctorand Domagoj Tolić left for Dubrovnik, LARICS is offering a postdoctoral position with the project ADORE.
LARICS had a unique opportunity to participate in the “Night of the Book” event organized by the FER library, dedicated to the 400th anniversary of W. Shakespeare’s birth. LARICS' third-year undergraduate students (Brigita Vrbanec, Marko Kovačević, Zvonimir Kunstek and Dominik Petrović) played a scene from Karel Čapek’s play R.U.R. together with NAO robots. Also, one of the NAO robots demonstrated its ability to read Hamlet’s “To be or not to be” displayed on the projection screen.
Matko Orsag, a LARICS postdoctoral researcher, gave an inaugural lecture at UNIZG-FER titled “Description of Object Images using the Moments Method” as a part of the undergraduate course Robotics practicum. The lecture was held successfully in front of an assessment committee, professors, researchers and undergraduate students.
LARICS members Tamara Petrović, Goran Vasiljević, Stjepan Bogdan and Barbara Arbanas participated in a “throw in” workshop for the subCULTron project, which was held in Italy. The workshop consisted of two parts, aiming to integrate, assemble and test the developed hardware and software.
As members of the group of ROBOTICS@FER.HR, LARICS participated together with LABUST and LAMOR as the exhibitor at the European Robotics Forum ERF 2016 in Ljubljana, Slovenia. ERF 2016 is the largest gathering of roboticists in Europe with more than 600 participants and more than 20 exhibitors showing their robots and robotic solutions.
Prof. Tomotaka Takahashi from the University of Tokyo made a short tour in Croatia, visiting the Faculty of Electrical Engineering and Computing on his way, too. His lecture was attended by more than 500 people who were interested to hear one of the global celebrities in the world of robotics.
We were proud to host nearly three hundred elementary school students in our lab during the last few weeks. These visits were organized as experimental intervention within the JOBSTEM project, aimed towards determining how STEM career aspirations are formed and how these aspirations are influenced by various factors, such as gender, family characteristics and early exposure to the STEM field. During the students' visit to our laboratory, Barbara, Antun, Damjan and Frano introduced them to basic concepts in robotics through our aerial, ground and humanoid robots.
Our laboratory has received a valuable donation by Schneider Electric, Zagreb. We were given eight analog I/O modules as add-ons to the eight previously donated Modicon M238 PLCs. This donation will enable our students to solve complex control problems in their automation and robotics projects and laboratory exercises. We would like to take this opportunity to thank Schneider Electric for their continuous support to the quality of education at our Faculty and especially in these two vibrant technical areas.
In front of the assessment committee (Prof. Stjepan Bogdan, Prof. Zdenko Kovačić, and Prof. Mladen Crneković), LARICS PhD student Ivica Draganjac, mentored by Prof. Kovačić, successfully presented and defended the topic of his doctoral dissertation titled „Decentralized Control of Free Ranging Automated Guided Vehicles in Automated Warehouses“. The aim of his doctoral dissertation is to extend the current state of the art practice in the Automated Guided Vehicle (AGV) Systems area and eliminate limitations present in current systems due to the use of centralized control architectures and predefined paths of AGVs.
LARICS received a grant from the Ford Motor Company for a 3-year project Advanced evolutionary learning based methods for optimal characterisation of non-linear aftertreatment technologies (ADELE), the main focus of which will be on LNT (Lean NOx Trap) models. The goal is to establish methods and algorithms for the optimal transfer of the measured data into the existing models or to identify the need for specific model features that need to be added or enhanced in order to improve the model prediction quality.
On 16 December 2015, the ASSISIbf LARICS team organized a training at the local Faculty for their master students. The purpose of the training was to present, through selected lectures and a practical session, the overall goals of the ASSISIbf project and the results accomplished in the first half of the project.
Frano Petric has demonstrated our small NAO humanoid robots to pupils from the primary school Fran Galović from Zagreb. This visit of young potential future students is a part of the STEM popularisation program Šuza supported by our Faculty of Electrical Engineering and Computing. It was interesting to read the impressions of the children which were published on the school web page. This reminds us all to hold on to the spirit of child’s curiosity and happiness in seeing and learning new things.
Prof. Zdenko Kovačić, Prof. Ivana Palunko and Dr. Domagoj Tolić visited the research group of Prof. Ji-Feng Zhang, director of the Institute of Systems Science, Academy of Mathematics and Systems Science at the Chinese Academy of Science. The visit is the part of the on-going bilateral project „Coordination Control of Multi-agent Systems“, funded by the Chinese and Croatian governments.
One of our traditional LARICS seminars was held this year in the picturesque Istrian town Tinjan. Preparations for the meeting took several days as the schedule of all presentations and the organization of the accompanying social program engaged all LARICS' human resources, strengthened by Prof. Nikola Mišković from LABUST.
Since 2014, the European Robotics Week has become a major robotics event in many places all over Europe. The coordinator for Croatia is LARICS postdoctorand dr. Matko Orsag. LARICS, together with the other two FER robotics laboratories, LAMOR and LABUST, opened the laboratory's doors to visitors and prepared several demonstrations of various robotics equipment for air, ground, and underwater operations.
Two LARICS projects were selected to represent the Faculty of Electrical Engineering and Computing on the University of Zagreb fair, which was held in the Student Centre on November 12-14, 2015. The goal was to show the fair's visitors what the laboratory, as well as the Faculty have to offer to new and current students.
Rene, the media darling among our NAO robots, was a special guest at the press conference that kicked off this year’s Interliber, the 38th international book, and teaching appliances fair. He was invited to announce the opening of the fair by reading a passage from The Little Prince, his favorite book. As an experienced media personality, he did not succumb to stage fright in front of the cameras and delivered a flawless reading performance, as you can see for yourself.
Our Prof. Stjepan Bogdan received the 2015 Fran Bošnjaković award from the University of Zagreb for his exceptional scientific achievements, promotion of the science and his contribution in the exchange of knowledge and education of young professionals. We would like to congratulate him on his excellence in science and education and we hope he will achieve even more success in the future!
Prof. Zdenko Kovačić and Tomislav Haus participated as presenters at the Conference on Innovation-driven Defense Enterprising organized by the Ministry of Defense of the Republic of Croatia. The titles of their lectures were “Design and Control of Professional Service Robots for Exploration and Inspection in Hazardous Environments” and “Aerial Robots – Mobile Manipulation using Unmanned Aerial Vehicles”. It was a unique opportunity for LARICS to present some of the research results that might have the potential for innovation-driven defense enterprising.
Before the assessment committee (Prof. Zdenko Kovačić, Prof. Stjepan Bogdan, and Prof. Bojan Jerbić), our LARICS doctoral student Marko Filipović, mentored by Prof. Bogdan, successfully presented and defended the topic of his doctoral dissertation titled „Robot Workstation Failure Recovery Strategy“. The Committee agreed upon the expected scientific contributions and following this decision, the Faculty Council and the Technical Committee of the University of Zagreb should approve the given topic proposal.
Our LARICS researcher Edin Kočo spent one month in India with Croatian company HRID d.o.o. He was involved in various inspection tasks of reactor pressure vessel (RPV) in Kudankulam nuclear power plant located in the south of India. This collaboration between LARICS and HRID resulted in the development of the software package FIONA, which is used for controlling the reactor inspection system.
We are happy to have been a part of European Researchers’ Night, a manifestation that takes place every year on the last Friday of September across Europe, with more than 30 countries and 300 cities involved. This year we were present with our NAO robots, showcasing our research on the ADORE project. Additionally, our ex-students presented the hexapod robot they developed while working on the graduate thesis and used this opportunity to promote their company and learning platform STEMI.
The rejuvenation of LARICS continues through the employment of two 2014 Rector Award winners, Marko Car and Antun Ivanović, and one of the most talented computer engineering students, Barbara Arbanas. They will take up work on several ongoing projects, including MORUS, EuRoC, and SubCULTron. Welcome on board!
We would like to use this opportunity to thank our now ex-LARICS research staff members: Dr. Ivana Palunko became an assistant professor at the University of Dubrovnik, Dr. Domagoj Tolić became a postdoctoral researcher at the University of Dubrovnik, and Dr. Alan Mutka became a lecturer at the High Technical School in Bjelovar, Croatia. Congratulations to all of them!
Frano Petric presented the paper entitled “Towards a Robot-assisted Autism Diagnostic Protocol: Modelling and Assessment with POMDP” at the 8th International Conference on Intelligent Robots and Applications (ICIRA), held in Portsmouth, UK. The paper presented the system of automatic encoding of diagnostic tasks and is coauthored by Damjan Miklić, Domagoj Tolić, Zdenko Kovačić and our colleagues from the Faculty of Education and Rehabilitation Sciences, Maja Cepanec and Sanja Šimleša.
Zdenko Kovačić and Stjepan Bogdan attended the American Control Conference ACC 2015 that was held on July 1–3, 2015, in downtown Chicago, Illinois, USA. On June 30th, Zdenko and Stjepan took part in the Workshop on Recent Advances and Future Directions on Adaptation and Control dedicated to the celebration of Frank Lewis’ birthday. They presented recent LARICS research results in the areas of multi-agent systems with unreliable communication and decentralized control of autonomous forklifts in industrial warehouse systems.
Tamara Petrović presented a paper at the ICINCO conference (12th International Conference on Informatics in Control, Automation and Robotics) that was held from 21st until 23rd of July 2015 in Colmar, in the Alsace region in north-eastern France. The presented paper, entitled Can UAV and UGV Be Best Buddies? Towards Heterogeneous Aerial-ground Cooperative Robot System for Complex Aerial Manipulation Tasks is the result of joint work of LARICS researchers Tomislav Haus, Matko Orsag, Barbara Arbanas, Stjepan Bogdan and Tamara Petrović.
Stjepan Bogdan and Domagoj Tolić attended the European Control Conference ECC 2015 that was held in Linz, Austria, July 15-17, 2015. Domagoj presented the paper entitled “Multi-Agent Control in Degraded Communication Environment”. During the conference, Stjepan participated in the European Control Association General Assembly as the representative of Croatia.
Within the last two weeks, two of our ongoing projects were shown and discussed on the Croatian television, in the show called Znanstveni krugovi (Scientific circles). Damjan Miklić and Tomislav Haus presented the Assisi project and Frano Petric and Sanja Šimleša presented the ASSISI project.
Our Zdenko Kovačić and Goran Vasiljević attended the EC-SAFEMOBIL 7th Consortium Meeting that was held on June 17–18, 2015, in Seville, Spain. They gave the report on the latest results on precise localisation and distributed control of multiple LGVs, two main goals of the Scenario 4: Autonomous Distributed Warehousing. On their way home, they stopped shortly in Lisbon, Portugal and enjoyed sightseeing in this beautiful European metropole.
Before the assessment committee (Prof. Zdenko Kovačić, Prof. Stjepan Bogdan, and Prof. Hrvoje Haramina), LARICS doctoral student Vedran Sesar, mentored by Prof. Bogdan, successfully presented and defended the topic of his doctoral dissertation entitled „Railway traffic control based on variable structure Petri nets“. The Committee agreed upon the expected scientific contributions and so, the Faculty Council and the Technical Committee of the University of Zagreb approved the given topic proposal.
As a result of a presentation about CANape held on FER on May 21, 2015, Vector Informatik, the distributor of CANape SW, decided to donate one CANape user license to researchers on FER. CANape is installed and maintained in LARICS (interested parties should contact Goran Vasiljević).
CANape is an all-round tool for Electronic Control Unit (ECU) calibration. With CANape, one can solve all necessary tasks in this field – from functional development of the software to rapid prototyping solutions and the production-ready ECU. This tool can be useful at the work desk, on the test bench or on test drives. It can be also used in data logging, parameter calibration, ECU and vehicle diagnostics or verification and visualization of object recognition algorithms for driver assistance systems.
Our LARICS PhD student Goran Vasiljević and LARICS industry collaborator Marko Cukon were attending the international exhibition SEA FAIR that was held in Tehran, Iran. Goran presented the exploration robot for fire fighting units that was developed within a two-year project financed by the Croatian Science Foundation. A short report about attendance of Croatian exhibitors on the Iran Sea Fair was published in the Croatian daily newspapers Večernji list.
Zdenko Kovačić, Stjepan Bogdan and Ivica Draganjac (LARICS PhD student) attended the IEEE International Conference on Robotics and Automation ICRA 2015. The conference was held on May 26-30, 2015 at the Washington State Convention Center in Seattle, Washington, USA. There they presented their papers and results of recent projects and research.
The kick-off meeting of the subCULTron project, which is a part of the H2020-FET-PROACTIVE initiative, was held on 26th and 27th of May in Pontedera, Italy. Project partners from Italy, Austria, Belgium, Croatia, Germany, and France gathered to share knowledge and ideas, and decide on the next actions. The project aims for achieving long-term autonomy in a learning, self-regulating, self-sustaining underwater society/culture of robots in a high-impact application area of Venice Lagoon, Italy.
As a member of the BladeHunters team, LARICS entered Stage II of EuRoC Challenge 3: Plant Servicing and Inspection. The project ‘Wind generator remote inspection system’ will start in August 2015. The project proposes an autonomous visual inspection system which will enable inspection experts, untrained in piloting micro aerial vehicles (MAVs), to tele‐operate them as an aid to their mission, while focusing on the inspection task at hand.
On May 07, 2015, one of the best-selling Croatian weekly magazines Globus published an article about the use of NAO H25 humanoid robots for autism diagnostics in the LARICS project ADORE funded by the Croatian Science Foundation. The article was entitled “My doctor is a robot”. We would like to thank Tomislav Novak, a Globus journalist, for his enthusiasm to present our work and thus popularize robotics among the readers of the magazine.
IEEE Central European Student and Young Professionals Congress was held in Zagreb from May 8 to 10, 2015, and was attended by 80 participants – student members and Young Professionals, as well as speakers, sections’ and Region 8 representatives from twelve IEEE Sections including Austria, Bosnia and Herzegovina, Bulgaria, Croatia, Czechoslovakia, Greece, Poland, Russia, Slovenia, Sweden, Turkey, and Ukraine.
The 3rd internal training for the ASSISIbf project has been held last week at the Artificial Life Lab in Graz. The LARICS team introduced our partners from Graz, Lisbon and Lausanne to the new CASU array that we have been developing during the past months.
LARICS had two papers presented at the 2015 IEEE Sensor Applications Symposium that was held from April 13-15 in Zadar, Croatia. Our PhD student Karlo Griparić presented the paper entitled “Combined Actuator Sensor Unit for Interaction with Honeybees”, describing the newest results of the on-going FP7 project ASSISI. Dr. Damir Arbula presented the paper entitled “Microimmune Algorithm for Sensor Network Localization”, describing the key results of his doctoral dissertation. Prof. Zdenko Kovačić is the coauthor of the second paper together with a LARICS PhD student Slaven Glumac, also participated in this very well organized event in the beautiful city of Zadar.
As a big surprise to all LARICS members, and surprising himself the most, Prof. Kovačić joined the Croatian team of basketball veterans VKK Zagreb and played at the FIMBA World League Maxibasketball tournament in the category M55+, where he won a bronze medal. Among 10 teams from Brazil, Chile (2 teams), Slovenia, Austria, Argentina, Japan, Russia, Moldavia and Croatia, VKK Zagreb won against Japan and Argentina and became the winner in group B. In the semifinals against Brazil, the Brasilian team dominated, but in the match with the Russian team for the bronze medal, the Croatian team returned to the winning path. Congratulations to our professor and his team!
On April 09, 2015 a LARICS Ph.D. student Ranko Munk (mentored by Prof. Zdenko Kovačić) successfully passed his doctoral qualification exam, presenting his gained knowledge about the intended topic of research – control of humanoid robots. Ranko’s presentation was entitled “Advanced control of biped robot motion” focusing on the intelligent control of robot balance while a robot is moving on uneven terrains and is affected by different robot balance disturbances.
NATO Science for Peace project “MORUS – Unmanned systems for maritime security and environmental monitoring” starts in 2015. The project's duration is 36 months and the partners are UNIZG-FER (LARICS and LABUST), University of Limerick (Marine Robotics Research Centre), University of Sarajevo (Faculty of Electrical Engineering) and University of Dubrovnik. The main goal of the MORUS project is to design and produce a prototype of a fully operational robotic system comprised of an Unmanned Aerial Vehicle (UAV) and an Unmanned Underwater Vehicle (UUV).
Our LARICS researchers held a lecture entitled “Robots: bringers of well-being or job destroyers?” at the “Open class days” of Nova Gradiška Highschool. The lecture drew a lot of attention, with over 100 students attending the two scheduled timeslots. Even though the students were very interested in the lecture itself, it was the live demonstration by one of our NAO robots that stole the show once again.
On March 20, 2015, LARICS researcher Alan Mutka successfully defended his doctoral dissertation and received a Doctor of Science degree in Electrical Engineering. Alan’s thesis was entitled “Adaptive control of quadruped robot locomotion through variable compliance of revolute spiral feet”. We would like to congratulate our colleague for this great achievment!
Our Domagoj held a lecture at the Electrical Engineering Department, University of Osijek, on March 16th 2015. The lecture was titled Networked Control Systems: Intermittent and Delayed Information and focused on the recent results related to the EOARD project. More info about the lecture can be found here (in Croatian ).
THe project ‘Human-in-the-loop Control of Multi-agent Aerial Systems Under Intermittent Communication’ was successfully completed on February 28, 2015. The project, funded by the Air Force Office of Scientific Research, reached all of the planned goals – the results of the 2 years of research have been published in more than 20 conference and journal papers.
From 19th until 21st of January, the Italian company Euroimpianti hosted the 6th EC-SAFEMOBIL consortium meeting in the town of Schio. Using two autonomous forklifts produced by Euroimpianti, the LARICS team held two successful demonstrations of decentralized control and markerless localization developed within the EC-SAFEMOBIL project.
Two LARICS papers were presented at the 2014 IEEE 53rd Conference on Decision and Control (CDC 2014). The conference was held in Los Angeles, CA, December 15-17. For more info regarding the conference, you can look here. Our Domagoj presented one paper and co-authored another one which was presented at the conference.
Our Frano Petric attented “Lucia 2014 – 2nd PhD school on Artificial Intelligence and Robotics”, held in Örebro, Sweden. Following the interesting presentations on the industrial perpsective of robotics, the participants had the opportunity to go through tutorials on Constraint Satisfaction Programming (CSP) and Answer Set Programming (ASP). The school was concluded with lectures on probabilistic logics, knowledge representation and benchmarking of robotic systems. Several attendees had the opportunity to present their work in form of a lecture at the PhD symposium, while others participated in a poster session.
Two of our Faculty's laboratories, LARICS and AMOR, formed a UNIZG-FER team, which finished 2nd in the first stage of the European Robotics Challenge – EuRoC. The next stop is the workshop in London and negotiations with potential partners for the next stage.
Our colleague Damir Arbula had successfully defended his doctoral dissertation under the supervision of Prof. Zdenko Kovačić and received a Doctor of Science degree in Electrical Engineering. Damir’s thesis was entitled “Distributed algorithm for node localization in anchor-free wireless sensor network”. Congratulations to Damir for reaching this great academic goal!
LARICS, AMOR and LABUST hosted the European robotics week event at the Faculty of Electrical Engineering and Computing. The event was organized as a lab tour, enabling the visitors to talk to our researchers, see the results of our research and gain some hands-on experience with our robots.
The newly started regional television N1 hosted Maja Cepanec and Frano Petric in their show “Novi dan”, where they discussed ASD prevalence rates across Croatia, Bosnia and Herzegovina and Serbia along with the first results of the ADORE project. Maja and Frano were accompanied by one of our NAO robots which demonstrated some of its features. A video from the show is available in Croatian here.
ADORE project team members from the Faculty of Education and Rehabilitation Sciences presented poster entitled “Challenges of using humanoid robots in the assessment of autism spectrum disorder“ at the AUTISM 2014: Geneva Centre for Autism International Symposium that was held from October 22-24 in Toronto, Canada.
Following our good old tradition, LARICS was one of the main attractions of the open doors manifestation held at the Faculty, which accompanies the showcasing of all parts of the University of Zagreb to potential future students coming from high schools. The main part of the LARICS demonstration were NAO robots, while our department was also represented by AMOR and LARES groups.
Professor Bogdan, Matko Orsag and Tomislav Haus, along with the new developments in aerial robotics and manipulation, were featured on Croatian television in the show called “The code of the future” (“Kod budućnosti”). The video of the show can be seen on the following link, for now only in Croatian.
Our young researcher Edin Kočo has successfully passed his doctoral qualification exam. Following the presentation of the paper entitled “Locomotion Control for Electrically Powered Quadruped Robot Dynarobin”, the committee concluded that he is more than ready to continue working on his research on the locomotion of legged robots.
Three of our LARICS colleagues' papers were presented at the 2014 IEEE Multi-Conference on Systems and Control, held in Antibes/Nice in France. Ivana and Tamara presented the papers that they authored or co-authored with other researchers from the Laboratory.
An EC-SAFEMOBIL review meeting was held in Brussels. Following the two day preparation, the SAFEMOBIL consortium presented the developments and results of 5 scenarios. With minor complaints about scenario 3, the progress report was accepted and the project continues according to plan.
Frano Petric attended the IEEE Global Humanitarian Technology Conference, held in San Jose (CA), USA. Frano presented the initial efforts and results of first clinical tests on the ADORE project with his paper entitled “Four Tasks of a Robot-assisted Autism Spectrum Disorder Diagnostic Protocol: First Clinical Tests“.
The results LARICS researcher Alan Mutka's and his coauthors' on the control of a quadruped robot have been published in the International Journal of Advanced Robotic Systems (Intech) in the article entitled “Adaptive Control of Quadruped Locomotion through Variable Compliance of Revolute Spiral Feet”. The article is accessible at the following JARS open-access link.
IEEE Croatia Section, Robotics and Automation Chapter, along with the Centre of Research Excellence for Advanced Cooperative Systems (ACROSS), organized a half-day workshop consisting of three talks. The first talk was given by our Frano Petric, the second by Dr Daniel Lofaro, and the third by Maja Varga.
Following the completion of the ACROSS project, Ivana Palunko obtained a position at the University of Dubrovnik, so she will be returning to her hometown to continue her academic career. Similarly, following the submission of his PhD thesis, Alan Mutka wanted to pursue his business career in his company Cognitus. We wish the best of luck to both of them and are looking forward to continue our work together on new projects!
The increase in the number of LARICS PhDs continues, with Matko becoming the newest member of our PhD club. Following the presentation of his dissertation entitled “Hybrid adaptive control system with augmented user interaction for stable aerial manipulation“, Matko successfully defended his scientific contributions before the committee, earning a Doctor of Science degree in Electrical Engineering.
As a part of bilateral research project “Coordination Control of Multi-Agent Systems”, jointly funded by the Croatian and Chinese governments, Prof. Han Fu Chen and Prof. Yanlong Zhao visited LARICS and our Faculty. During their stay in Zagreb, our Chinese guests gave two lectures, had a meeting with the Dean, attended Matko’s PhD thesis defense and participated in presentations on current research activities in the ACROSS center.
Professor Zdenko Kovačić and Frano Petric went to Düsseldorf to present ADORE project on the REHACARE fair. We would like to thank Miroslav Vrankić from the University of Rijeka, founder, and CEO of E-GLAS, for the invitation to join him at the fair. Professor Kovačić used this opportunity to talk with Miroslav about possible uses of the speech processing part of their Serwantess software in our ADORE applications.
A Workshop on Cooperative Systems was organized by ACROSS, with the intention to network with international and Croatian researchers and industry professionals who have an interest in strategic research domains of robotics, networked embedded systems, renewable energy sources and control methods. The workshop was held in Dubrovnik, September 10-12 and the book of abstracts can be found here.
Our LARICS team, represented by prof. Stjepan Bogdan, dr. Ivana Palunko, dr. Domagoj Tolić and Tomislav Haus, visited the Academy of Mathematics and Systems Science at the Chinese Academy of Sciences in Beijing, as a part of the project “Coordination Control of Multi-Agent Systems” financed by the Croatian and Chinese government. Our researches presented the Laboratory's work and research results.
An EU robotics group meeting was held in Budapest on 8 and 9 September, 2014, with the main goal to develop suggestions for the Work Programme content for Robotics Call 3&4. The group discussed and proposed suggestions about how and what should be included in the calls by updating the Multi-Annual Roadmap (MAR). LARICS was represented by Ivana Palunko and Matko Orsag.
The kickoff meeting for the ADORE project was held on 5th Septemeber 2018 at UNIZG-FER. The project logo has been inaugurated and organizational topics have been discussed. Our team members are optimistic and eager to get to work!
The ADORE: Autism Diagnostic Observation with Robot Evaluator project funded by Croatian Science Foundation (HRZZ-93743-2014) started today, with the signing of the contract between LARICS and HRZZ. The main goal of the project is to help clinicians from the Faculty of Education and Rehabilitation Sciences diagnose autism spectrum disorders more quickly and efficiently by using NAO robots made by Aldebaran Robotics. Through this project, the LARICS team will be working on developing a new set of motoric and cognitive skills for our humanoid robots.
Our colleague Ivana Palunko has been selected as one of the outstanding reviewers for IEEE Transactions on Robotics (IEEE T-RO) for the year 2013. The complete list of T-RO reviewers in 2013 can be found here. Congratulations to Ivana!
LARICS PhD candidate Karlo Griparić passed his doctoral qualification exam. Following the presentation of his paper on the development of a bio-hybrid collective adaptive system, he answered all the questions of the committe and showed that he is ready to pursue his PhD degree.
Tamara has successfully defended her doctoral disseration titled “Control Of Variable Structure Multi-Vehicle Systems Based On Resource Allocation”, receiving a Doctor of Science degree in Electrical Engineering. Congratulations to our colleague!
LARICS researcher Edin Kočo spent 5 days in France participating in the international competition Solar Decathlon Europe 2014 in Versailles, where universities demonstrate their concepts of low energy and smart housing. During the project, Edin worked on the development of a wireless sensor network that is used as a monitoring system for various parameters of the house (humidity, pressure, temperature, luminosity, gas leaks…) and as a feedback for smart HVAC control using a model predictive controller.
LARICS team (prof. Stjepan Bogdan, Matko Orsag, Tomislav Haus, master students Antun Ivanović and Marko Car) spent a few days in a military base in Split to perform experiments within the joint national LARICS-LABUST project “Cooperative control of heterogeneous robotic systems”. These were the first outdoor experiments for the LARICS UAV team.
Dr. sc. Damjan Miklić and Goran Vasiljević have arrived in Euroimpianti, where they will be experimenting with a new type of autonomous Laser Guided Vehicle (LGV). The list of tasks contains calibrating the LGV odometry, testing communication with new laser range sensors and control of steer and traction motors from the LARICS software.
LARICS members are a part of the UNIZG-FER team admitted for competition at the European Robotics Challenge – EuRoC. Currently they are in Stage I of the competition, starting on July 7th, 2014. They are among 34 other teams competing at Challenge 3 – Plant Servicing and Inspection. The evaluation phase and scoring of Stage I will take place in November, 2014.
LARICS researcher Tomislav Haus attended the 13th European Control Conference, which was held from the 24th to the 27th of June 2014 in Strasbourg, France. There, he took part in presentations and discussions and held a presentation of his own.
The robot RJET 111 developed by Inteco Robotics, Zagreb in collaboration with LARICS, has been successfully transported from Zagreb to the thermal power plant (TPP) Plomin (Slovenia) and placed on the edges of the channel for supplying sea water for cooling. There the robot will aid the cooling process for the plant.
On June 16-19, 2014, LARICS researchers Goran Vasiljević, Edin Kočo and Domagoj Tolić attended the 22nd Mediterranean Conference on Control & Automation MED14 that was held in Palermo, Italy. Edin presented two papers related to the research on control of quadruped robots, while Goran presented the paper about the marker-less SLAM method optimized for use in industrial environments. Domagoj presented a paper about stabilizing transmission intervals and delays for LTV control systems.
Who can be more proud these days than our Lab? Marko Car and Antun Ivanović, with their work “Augmented User-Interface for Control of Flying Robot Manipulator”, and Anja Babić and Nikola Jagodin, with their work “The NAO humanoid robot in social interaction: system elements demonstrated on a game of hide and seek” received Rector Awards for the best students’ works in 2013/2014! Congratulations to our colleagues!
Three days spent in DLR in Oberpfaffenhofen, Germany during the General meeting of the FP7-IP project were productive and very memorable. Being in one of the leading European research institutions is exciting by itself. But having the privilege to see the control centre of the Columbia space station, see and talk about new robotic systems designed in DLR, will remain inspiring for our own research work. The evening spent in Munich watching the Football Worldcup opening match Croatia vs. Brazil will unfortunately be remembered for different reasons.
Ivana Palunko, LARICS postdoctoral researcher, gave her Inaugural lecture on June 13th at UNIZG-FER titled “Implementation of PID controllers on FPGA circuits” as a part of the undergraduate course Computer-Controlled Systems. The lecture was held successfully in front of an assessment committee, professors, researchers and undergraduate students. Congratulations to our colleague!
It was a beautiful Sunday, sunny and warm, just perfect for the gathering of our Lab in the vacation house of Edin Kočo’s family. Skipping breakfast and so really hungry, we appreciated our host who had decided to prepare a lamb on the grill. While some of us were playing cards, a group of enthusiasts burnt a pile of firewood and after just less than five hours, our food fiesta could begin. Exhausted by the sun, food and drinks, we went home thinking how to remodel our Lab to be better prepared for such precious relaxing moments.
The 2014 IEEE International Conference on Robotics and Automation (ICRA) was held at the Hong Kong Convention and Exhibition Center, Hong Kong, China, from May 31 to June 5, 2014. Prof. Stjepan Bogdan and Matko Orsag were participating in the Workshop “AERIAL ROBOTS PHYSICALLY INTERACTING WITH THE ENVIRONMENT“ organized by Prof. Anibal Ollero with a presentation “Towards Valve Turning using a Dual Arm Aerial Manipulator”, co-authored by Stjepan Bogdan, Matko Orsag, and Paul Oh and Christoper Korpela, Drexel University, USA.
This year, the Head of Department of Control and Computer Engineering (ZARI) decided to take us all to the adrenaline park Zasadbreg placed among picturesque hills and woods of northern Međimurje, the region known for beautiful nature and friendly people.
Prof. Bojan Jerbić from the Faculty of Mechanical Engineering and Naval Architecture and our prof. Zdenko Kovačić were guests in the Croatian national television (HRT1) broadcast “Društvena mreža”, where they discussed the cognitive abilities of today's and future robot generations. Prof. Kovačić briefly presented the goals of the project ADORE – Autism Diagnostic Observation with Robot Evaluator, accepted for funding by the Croatian Science Foundation.
Mr. Santiago Rendon Vera, a visiting researcher from the University of Seville, Spain, held a lecture organized by the IEEE Croatia Section Robotics and Automation Chapter entitled: “Path planning with Pseudospectral Collocation Methods”. Santiago has been invited for the period of three months to visit LARICS and participate in joint research on multi-robot trajectory optimization.
Ivana Palunko and Domagoj Tolić spent 6 months at the Institute for Information-oriented Control (ITR) for joint research with prof. Sandra Hirche. This visit was a part of the ACROSS project aimed at establishing collaborations between UNIZG-FER and EU research institutions. Except for being very successful research-wise, this visit gave them an opportunity to explore Bavarian castles and enjoy some famous Bavarian beer.
Elections are finished and Tamara Petrovic is the new president, and Prof. Nikola Mišković is the new vice-president of the IEEE Croatia Section Robotics and Automation Chapter. We wish Tamara and Nikola success in their work and many interesting events for all members of the R&A Chapter.
The Croatian daily TV show Dobro jutro, Hrvatska (Good morning, Croatia) invited assist. prof. Maja Cepanec (ERF-Faculty of Education and Rehabilitation Sciences), prof. Zdenko Kovačić and Frano Petric to say a few words about the new project ADORE – Autism Diagnostic Observation with Robot Evaluator, financed by the Croatian Science Foundation for the period of 2014-2018, in which LARICS’ NAO robots will play a central role.
The 2nd Festival of Technical Culture was organized by the Croatian Association of Technological Culture (CROTEC) in Bočarski dom, Zagreb. The LARICS team (Zdenko Kovačić, Frano Petric, Alan Mutka, Edin Kočo, and Mislav Covran) participated at the Festival on behalf of the Croatian Robotics Association and presented our current work and research.
In front of the five-member committee (Prof. Vedran Bilas, Prof. Zdenko Kovačić, Prof. Gordan Sisul, Prof. Stjepan Bogdan, and Prof. Drago Žagar), our LARICS PhD student Damir Arbula, M.Sc. (Technical Faculty University of Rijeka) successfully presented and defended the topic of his doctoral dissertation entitled „Distributed algorithm for node localization in anchor free wireless sensor network”. The Committee agreed upon expected scientific contributions and the same approval is expected to come from the Faculty of EE&C Council and the Technical Committee of the University of Zagreb.
Popularisation of robotics at Science Festivals held every year at the Technical Museum has become LARICS’ tradition. This year at the Science Festival 2014, LARICS organized a workshop entitled „The role of waves in control of aerial and walking robots“ with particpation of Prof. Zdenko Kovačić, Frano Petric, Anja Babić and Kruno Hrvatinić. For this occassion, we prepared a nice poster that was put on display.
Four LARICS PhD candidates, Slaven Glumac, Tomislav Haus, Frano Petric, and Vedran Sesar, succesfully passed their doctoral qualification exams. This is the first of many steps in their doctoral curriculum, which indicates that they are all ready to continue their doctoral work with the highest quality. We wish our colleagues the best of luck!
During three days, February 03-05, the representatives of all partners of the EC-SAFEMOBIL Consortium gathered at the Faculty of Electrical Engineering and Computing to discuss issues relevant for success of this four-year FP7 project. Along with a series of presentations and discussions, our visitors made a short tour around our robotics research-oriented laboratories (ACROSS, LARICS, AMOR, LAPOST). The evenings were reserved for sightseeing of the Zagreb old town and dining on some typical Croatian dishes.
Our more than forty years long cooperation with the University of Rostock, Germany continued by Prof. Zdenko Kovačić and Prof. Zoran Vukić's visit to the Institute of Automation, Control Application Center Rostock and to the Hochschule Wismar, University of Applied Sciences: Technology, Business and Design.
The daily TV show Hrvatska uživo (Croatia live) aired a feature about a new project in the making in which LARICS’ NAO robots play a central role. The proposed project is based on interdisciplinary collaboration between researchers from the Faculty of Education and Rehabilitation Sciences and LARICS laboratory and aims to facilitate the diagnosing and treatment of Autism spectrum disorders by using robots as assistants.
This year the celebration of the Faculty Day was especially exciting for our Lab. Several LARICS members have become the recipients of prestigeous Faculty awards. Prof. Stjepan Bogdan, students Anja Babić and Kruno Hrvatinić, and researcher Edin Kočo were awarded for their hard work.
In front of the assessment committee (Prof. Zdenko Kovačić, Prof. Stjepan Bogdan, and Prof. Danko Kezić), LARICS young researcher Tamara Petrović successfully presented and defended the topic of her doctoral dissertation entitled „Centralized control of variable structure multi-vehicle systems based on resource allocation”. The Committee agreed upon the expected scientific contributions and the Faculty Council and the Technical Committee of the University of Zagreb approved the given topic proposal. Congratulations to our colleague!
Dr. Kevin Bollino is the officer of the European Office of Aerospace Research and Development (EOARD) who has come to Zagreb for the 1st year review of the project “Human-in-the-loop Control of Multi-agent Aerial Systems Under Intermittent Communication” financed by the Air Force Office of Scientific Research (AFRL).
Our prof. Zdenko Kovačić has become the recepient of the „Fran Bošnjaković Award“ for the year 2013, presented to him by the Rector of the University of Zagreb for his distinctive scientific results, exceptional contributions to the advancement and development of control systems, flexible automation and robotics, for educating students and young experts, and for public activity and promotion of his Faculty and University at home and abroad.
In the first week of November, our German colleagues from the University of Rostock, Prof. Wolfgang Drevelow, Prof. Dr.Ing. Torsten Jeinsch, Dipl. Ing. Martin Kurowski, and Erik Rentzow, visited our Faculty and initiated discussions about ways of research collaboration in the forthcoming years. T
Dr. Thomas Schmickl, professor at the Karl-Franzens University Graz, Artificial Life Lab, Department of Zoology, gave an extremely interesting lecture entitled „The new Cyborgs: Robots and Animals Forming a Mixed Society?“. He discussed machines that are used to trick humans or animals to study their behaviors.
As part of the RADDAR festival, organized by the XV high school of Zagreb and the Faculty of Electrical Engineering and Computing (Prof. Vesna Županović), LARICS members (Prof. Zdenko Kovačić, Dr. Damjan Miklić, Frano Petric, Anja Babić, and Kruno Hrvatinić) prepared three performances with a pair of NAO robots, who showed off their dancing moves and perception skills to almost 90 primary school kids interested in maths.
Prof. Zdenko Kovačić, Goran Vasiljević and Frano Petric spent two days in Schio, Italy performing experiments with a new marker-less SLAM algorithm using the fusion of maps obtained by lasers mounted on the Euroimpianti laser-guided vehicles (autonomous forklifts). The processing of acquired data yielded first marker-less localization results which seemed accurate enough for usual industrial environments.
Our LARICS PhD student Slaven Glumac went to Manchester and presented a paper entitled “Microimmune Algorithm for Solving Inverse Kinematics of Redundant Robots” at the IEEE International Conference on Systems, Man, and Cybernetics 2013 . Slaven defined a multiobjective criterion to compare performances of microimmune and microgenetic algorithms. Multiobjective optimization was used to determine a set of best algorithms, and the microimmune algorithm proved superior in solving a selected optimization problem.
In front of the assessment committee (Prof. Zdenko Kovačić, Prof. Stjepan Bogdan, and Prof. Bojan Jerbić), LARICS young researcher Alan Mutka successfully presented and defended the topic of his doctoral dissertation entitled „Adaptive Control of Quadruped Locomotion through Variable Compliance of Revolute Spiral Feet”. The Committee agreed upon the expected scientific contributions and the Faculty Council and the Technical Committee of the University of Zagreb approved the given topic proposal. Congratulations!
Prof. Zdenko Kovačić attended the 2nd year EC-SAFEMOBIL Review Meeting in Brussels, Belgium where he presented the most recent results of the LARICS research team in this FP7 project. The meeting finished successfully with recommendations of the Project Officer and the Review Committee members for financing of the third year joint research efforts of all partners in the Project Consortium.
LARICS researchers Dr. Damjan Miklić, Karlo Griparić and Tomislav Haus, attended the ASSISI_bf general assembly meeting in Lisbon, held on October 8th, 2013. The meeting was held at the Faculty of Sciences, University of Lisbon.
Prof. Stjepan Bogdan gave a talk “Nature as an inspiration in modern robotics”, organized by the eStudent organization. At the end of the talk, PhD student Frano Petric demonstrated some interesting features of NAO humanoid robots.
LARICS researchers Tamara Petrović, Matko Orsag and Damjan Miklić, visiting TU Crete for training activities within the ACROSS project, gave talks about their current research in front of their host institution’s faculty and students.
Dr. Kristijan Hengster Movric, researcher at the University of Texas at Arlington, USA, gave a talk entitled “Cooperative Control of Multi-agent Systems – Stability, Optimality and Robustness”. This talk has brought together stability and optimality theory to design distributed cooperative control protocols that guarantee consensus in multi-agent systems and are globally optimal with respect to a positive semi-definite quadratic performance criterion.
The European Commission and the Community Research and Development Information Service (CORDIS) recognized LARICS as one of the leaders of Robotics research in Croatia, which have a significant impact on Europe’s ICT R&D, through the article entitled Croatia ICT: the newest Member State is up and running. As good news travels fast, the story was also covered in one of Croatia’s leading internet portals (read the full story).
Our prof. Stjepan Bogdan presented the paper “ASSISI: Charged Hot Bees Shakin’ in the Spotlight” at the 2013 IEEE 7th Conference on Self-Adaptive and Self-Organizing Systems, Philadelphia, USA, 9-13 September 2013. The paper presents the concepts and initial results of ASSISI_bf project. During his stay in the USA, Prof. Bogdan visited the Drexel Autonomous Systems Lab and talked with Prof. Paul Oh, director of the laboratory.
The rejuvenation of LARICS continues through the employment of another Rector Award winner and one of the best students of the generation. Edin Kočo is expected to bring new skills to our Lab, continuing his work on quadruped walking robot Dynarobin, while taking part in some of the projects LARICS is involved in. Welcome, Edin!
During his short visit to our Faculty, where he visited the ACROSS laboratory and gave a lecture entitled „Overview of research results in visual servoing“, Prof. Francois Chaumette, the leader of the Lagadic group at the IRISA/INRIA Institute Rennes, France, also visited LARICS and exchanged a few words about research plans with young LARICS researchers.
LARICS professors Zdenko Kovačić and Stjepan Bogdan took part in the panel session “Advanced Cooperative Systems – Research Challenges and Application Opportunities” which was held at the International Conference on Computer as a Tool EUROCON 2013 in Zagreb, where they presented the research goals and results of two LARICS FP7 projects, EC-SAFEMOBIL and ASSISI.
In the last week of June 2013, LARICS professors Zdenko Kovačić and Stjepan Bogdan spent a couple of days in the beautiful setting of the Technical University of Crete, where they visited the group of prof. Nikos Tsourveloudis within the FP7 project ACROSS collaboration program. In the same time, they also presented three papers at the 21st Mediterranean Conference on Control & Automation MED2013 that was held in Platanias-Chania, Crete, Greece.
Edin Kočo is the recipient of the 2013 Rector Award for his work “Development and production of equipment for continuous monitoring and management of agricultural systems”! Congratulations to our colleague, we hope he will keep doing this well in the future. You can see the long list of LARICS Rector Awars winners in the detailed news.
Domagoj Tolić presented his paper “Decentralized Output Synchronization of Heterogeneous Linear Systems with Fixed and Switching Topology via Self-Triggered Communication” on the 2013 IEEE American Control Conference held in Washington DC from June 17 till June 19. The paper is co-authored with Prof. Rafael Fierro. Along with Domagoj, Matko Orsag presented his paper “Stability Control in Aerial Manipulation” co-authored with Christopher Korpela and Prof. Paul Oh.
LARICS was present at the COST workshop on social robotics held in Brussels, June 10-13, 2013. Frano Petric presented our efforts with NAO robots through a talk entitled “Application of Humanoid Robots in Diagnostics of Autism”. Through this networking event, we learned a lot about research in the field of social robotics and established contacts which could result in future collaborations. We would like to thank the organising committee for the invitation. A short video about this workshop is available here.
The review meeting for the 1st year of FP7 project EC-SAFEMOBIL was held in Brussels, June 13. Following a detailed preparation of deliverables, Professor Kovačić and all the partners in the consortium put a lot of effort into their presentations, ensuring a positive response of the Project Officer and reviewers. The project continues, and we are looking forward to testing some of our algorithms in Euroimpianti facilities. The review meeting for 2nd year will be held in October 2013.
During his short visit to our Faculty, where he came to be a part of the committee for the defense of Damjan Miklić’s doctoral dissertation, Prof. Fierro also found time to visit the ACROSS and LARICS laboratories and talk to young researchers working there. It should be mentioned that prof. Fierro was a PhD advisor for Ivana Palunko and Domagoj Tolić, and the host of Damjan Miklić during his Fulbright fellowship spent in prof. Fierro’s lab. Prof. Fierro expressed his willingness to explore the possibilities of further collaboration between the two laboratories.
Dr. Rafael Fierro, professor at the University of New Mexico, Department of Electrical & Computer Engineering, Albuquerque, USA, held a very interesting lecture on synchronization strategies for robotic networks. As Prof. Fierro said, robotic networks are particularly well suited to execute tasks that cover wide geographic ranges, require significant parallelization, and/or depend on capabilities that are varied in both quantity and difficulty.
{kind=link}
Damjan Miklić successfully defended his doctoral dissertation and received a Doctor of Science degree in Electrical Engineering. Damjan’s thesis was entitled “Grid-based coordinated control of mobile robot formations”. The main results of his work are new algorithms and methods for creation, maintenance and change of formations for a group of autonomous ground mobile robots using a matrix model of a system, and a grid-based model of the space in which robots are moving, together with simulation and experimental results obtained after application of these methods. Congratulations to our colleague!
Croatian Association of Technological Culture (CROTEC) organized the 1st Festival of Technical Culture that was held in Bočarski dom in Zagreb. Our LARICS team (Damjan, Frano, Anja, Kruno, Mihael and Zdenko) was invited to participate at the Festival on behalf of the Croatian Robotics Association.
Our team with seven members and 5 NAO robots held a workshop at the Technical Museum as a part of Science Festival. Workshop named „Humanoid robots – partners in work and play“ was organized by Professor Zdenko Kovačić, Damjan Miklić and Frano Petric, with help from Anja Babić, Tamara Petrović, Kruno Hrvatinić and Mihael Mercvajler. Visitors could see what the NAO robots could do and find out how they learned it.
Croatian Prime Minister Zoran Milanović and his team visited our Faculty to express their support for the initiative of building a new Faculty Innovation Center which would employ young doctors of science in order to boost the Croatian ICT and EE industry by delivering advanced and competitive solutions for future globally concurrent products.
Starting April 15, 2013, LARICS and Inteco Robotics Zagreb signed a contract with the goal of developing an R-JET 111 robot for hydrodynamic treatment of algae in the channel of the Thermal Power Plant Plomin. R-JET 111 is a remotely controlled robot which will operate on a 2 km long channel that connects TPP Plomin and the Adriatic sea. The LARICS research team is responsible for the development, implementation and testing of the control system for R-JET 111.
LARICS and our industrial partner Hrid NDT Zagreb signed three contracts for R&D collaboration on robots for inspection tasks in nuclear power plants. The first contract is about the development of the control system of the RCP manipulator for ultrasonic testing of welds of the main pump in the VVER-1200 nuclear power plant. The second one deals with the development of control software for SGIS-D manipulator used for testing of pipes of a steam generator. The third one is concerned with development of control of the RPV manipulator for inspection of the reactor vessel VVER-1200.
A LARICS team, consisting of prof. Zdenko Kovačić, Damjan Miklić and Frano Petric, visited Euroimpianti headquarters in Schio, Italy. The purpose of the visit was to discuss further collaboration on the FP7 project EC-SAFEMOBIL, specifically to arrange the technical details of localization tests that are to be performed in Euroimpianti facilites in the beginning of May.
Professor Bogdan presented the ASSISI project to our Faculty in a one-hour talk. The talk, organized as part of the ACROSS Colloquia lecture series, filled the TCR auditorium up to the very last seat, setting a new record for Colloquia attendance.
The ASSISIbf project, part of the FP7 FOCAS initiative, has started on February 1st, 2018. The goal of the project is to develop technological tools that will enable real-time interaction with bee and fish societies and ultimately gain new insights into the self-organization mechanisms of collective systems.
Maja Varga, our LARICS young scientist, currently a PhD student at the EPFL Lausanne, Switzerland, held a very interesting lecture about the fixed wing robots being used in numerous outdoor applications, such as providing area coverage, mapping applications, providing communication relay, environmental monitoring. In many of those applications, exact path of the robot is preprogrammed and mission is usually planned in advance. Each flying robot needs a dedicated human operator to provide safe flight.
LARICS successfully finished a two year project named “Electronic differential for small electrical vehicle” funded by the Croatian Science Foundation (HRZZ) and EXOR. The result of the project is an electronic differential, comprising the traction control system (TCS), the anti-lock braking system (ABS) and the electronic stability control (ESC). Along with a simulation conducted on a nonlinear car model, experiments were also conducted on the laboratory system developed for testing TCS, as well as on the electric car developed by Croatian company DOK-ING.
Within the series of colloquia organized by the FP7 project ACROSS, an international research advisor of the ACROSS project, Prof. Nikos Tsourveloudis, who is a professor of manufacturing technology at the Technical University of Crete (TUC), Chania, Greece, where he leads the Intelligent Systems and Robotics Laboratory (www.robolab.tuc.gr) and the Machine Tools Laboratory, held a very interesting lecture about the ability of living organisms to successfully cope and provide good solutions to almost all robotics-related problems.
The Croatian Society for Robotics (CSR) with the support of the Croatian Association of Technological Culture (CROTEC) organized the 5th CSR Workshop “Robotic Systems 2012”. About thirty people gathered in the Great Hall of the CROTEC headquarters in Zagreb to listen to the presentations about contemporary humanoid robots, including more detailed presentations of two humanoid robots, Robotis Bioloid and Aldebaran Robotics NAO H25 ATOM, which were demonstrated at the Workshop.
A symbollic eighteen years after the founding of the Croatian Society for Robotics (CSR), the process of robotics' popularization and expansion of the robotics activist base resulted in the foundation of the Croatian Robotics Association (CRA). Delegates of five founder entities, CSR Zagreb, Society for Robotics Split, Robofreak Varazdin, Robotics & Informatics Club Popovaca, and Society for Robotics Istria Pula, gathered in the Great Hall of the CROTEC seat in Zagreb to elect the members of the CRA bodies and express their firm determination to continue with popularization of robotics in all Croatian regions. Prof. Zdenko Kovačić and Mr. Igor Ratković were unanimously elected for the President and the Secretary of the CRA, respectively.
HRID d.o.o. Zagreb and LARICS are working together on the project of modernization of the Steam Generator Inspection System (SGIS). The goal of the project is to build a new improved version of SGIS with a modular system design by using Beckoff intelligent peripheral units communicating over EtherCAT, instead of one central control unit, which was used before. Goran Vasiljević is a key LARICS person in this development.
LARICS received a description of research protocol to study the possible use of humanoid robots in autism diagnosis. As a part of this research, our NAO robots will work with children aged 2-6, and should be able to detect some basic forms of communication, such as gaze, gestures and vocalization. Research protocol is based on ADOS – Autism Diagnostic Observation Schedule, and was written by Maja Cepanec, Sanja Šimleša and Jasmina Stošić, researchers from Faculty of Education and Rehabillitation Sciences, University of Zagreb.
Basketball, volleyball and other sports activities in the nearby gym were replaced by exciting first experiments with four Pioneer mobile robots simultaneously controlled with a new distributed control algorithm being developed within the FP7 project EC-SAFEMOBIL. The players of the LARICS „Night Owls“ team were Damjan Miklić, Tamara Petrović, Ivica Draganjac, Frano Petric, and Tomislav Haus. The results were very promising and inspiring for further research.
On November 27, 2012 two LARICS PhD students, Matko Orsag and Marko Filipović (both mentored by Prof. Stjepan Bogdan) successfully passed their doctoral qualification exams, thus making the first step towards the formal definition of the topics of their dissertations. Matko's presentation was entitled “Unmanned aerial vehicles in contact with environment”, while Marko's was “Fault recovery in manufacturing systems using Petri nets”.
Every year, the celebration of the Day of the Faculty of Electrical Engineering and Computing starts with a ceremony of receiving the „Josip Lončar“ Awards for the best achievements in the former academic year. A young LARICS researcher, Tomislav Haus, was the recipient of the Bronze Plaque Josip Loncar for remarkable results achieved in the 5-year studying period (he has a perfect exam score 5.0).
The robotics enthusiast, Boris Anić-Ćurko, also the owner of Inovatic ICT d.o.o., Zagreb, visited our laboratory and donated one EmoRo mobile robot (EmoRo IR Radar) for professional testing and evaluation. A brand new series of EmoRo mobile robots has been just put on the market by Inovatic. Boris has helped our students many times when making electronic modules using the SMD technology, and now we were delighted to help Boris with our professional opinion, particularly when it was quite obvious that EmoRo robot looked very impressive.
As part of the series of colloquia organized by the FP7 project ACROSS , Dr. Ivana Palunko, the ex-LARICS student and former PhD student at the University of New Mexico, Albuquerque, USA, currently being employed at the Faculty of EE&C in Zagreb as the ACROSS postdoctoral researcher, held a very interesting lecture about the load transportation using quadrotors. In her talk, she investigated problems that occur during load transportation using small scale quadrotors.
On November 3rd, the best-selling Croatian newspapers 24 sata published an article titled “Croats teach robots to dance”. about the humanoid robots in our Lab. We would like to thank Anela Kuburas, a 24 sata journalist, for her enthusiasm to popularize robotics among the numerous readers of 24 sata.
As parto of a series of colloquia, organized by the FP7 project ACROSS , Dr. Domagoj Tolic, the ex-LARICS student and former Ph.D. student at the University of New Mexico, Albuquerque, USA, currently being employed at the Faculty of EE&C in Zagreb as the ACROSS postdoctoral researcher, held a very interesting lecture about the investigation of stability of nonlinear control systems under intermittent information.
The 2012 IEEE CSS Multi-conference on Systems and Control (MSC 2012) was held on October 3 – 5, 2012, at Dubrovnik Palace Hotel conference center in Dubrovnik, Croatia. The conference was a joint event, comprising International Symposium on Intelligent Control (ISIC) and Conference on Control Application (CCA). Our professors, researchers and students were there to take part in and organize the conference.
Our laboratory has become much younger by employing Tomislav Haus and Frano Petric to work on the research topics related to the FP7 projects in which LARICS is a research partner. Both Tomislav and Frano were among the best students in their generation, so we believe that their contribution to our Lab will be immense. Congratulations to our new colleagues!
On September 27, 2012 our LARICS PhD student Alan Mutka (advised by Prof. Zdenko Kovačić) successfully passed his doctoral qualification exam. Alan's presentation was entitled “Motion of two-legged and four-legged walking robots”. He has shown that he is fully prepared for a formal definition of the topic of his doctoral dissertation. Good luck with your dissertation, Alan!
An article about the Inteco robot R Jet 062 was published in the 2012 Autumn issue (pp. 132-136) of the Croatian Airlines in-flight magazine Croatia. This robot was developed in collaboration of Inteco Ltd. Zagreb and LARICS. The article written by the Croatia journalist Davorka Vukov-Čolić describes in detail the characteristics of the robot, as well as its potentials for successful commercialization.
Thanks to the invitation of Mr. Ante Glibo from the Croatian television, the LARICS team (Prof. Zdenko Kovačić, Tamara Petrović, Damjan Miklić, Anja Babić, and Kruno Hrvatinić) took part in the very popular morning broadcast for students “Školski sat”. We brought our NAO H25 robots and demonstrated a couple of tricks, with robots dancing and playing a board game. We had a lot of fun, and those who saw the show say that it was pretty cool.
Our Prof. Zdenko Kovačić participated in the First Croatian Computer Vision Workshop (CCVW2012), held in Zagreb, Croatia, with the presentation “Computer vision for robotics” shared with Prof. Bojan Jerbić and Prof. Ivan Petrović. The workshop was organized by the newly established “Center of Excellence for Computer Vision” and is sponsored by the University of Zagreb, Faculty of Electrical Engineering and Computing, and by the IEEE Croatia Section. We were pleased to welcome Dr. Max Blanco in our laboratory after his very interesting lecture at the CCVW2012.
Prof. Zdenko Kovačić and Goran Vasiljević were participants of the 10th IFAC Symposium on Robot Control that was held in Dubrovnik, Croatia on September 05-07, 2012. The Symposium was very well organized by a team led by Prof. Ivan Petrović who served as the General Chair. Goran Vasiljević presented the paper entitled “Kinect-based Robot Teleoperation by Velocities Control in the Joint/Cartesian Frames“, while Prof. Kovačić chaired the session „Telemanipulation“.
Our LARICS young researcher Tamara Petrović participated in the International Multicopter Girls Camp, which was held on July 2 – 15, 2012 in Ilmenau University of Technology. Ilmenau is a town in the German federal state of Thuringia. During the camp, Tamara had the opportunity to work with international colleagues in the area of autonomous navigation of a hexacopter. In particular, the goal was to develop a software solution that will navigate a hexacopter to find and follow a radio-signal transmitter. All in all, it was a really fun and an interesting experience!
We have new Rector Award laureates! LARICS students Josip Česić, Jurica Goričanec, and Tomislav Haus have become the recipients of the 2012 Rector Award for their student work entitled “Self-spinning Unmanned Aerial Vehicle”. Congratulations to our hardworking students! You can find a full (and long!) list of all our laureates in the detailed news.
Our colleagues, Prof. Zdenko Kovačić and Tamara Petrović, spent three days in Paris at the seat of Aldebaran Robotics, where they participated in a three-day training session for advanced programming of NAO H25 ATOM robots. Although these sessions were quite demanding, some energy still remained in store so that they could visit the most attractive landmarks of the beautiful French capital.
On May 22nd Prof. Zdenko Kovačić held the presentation of the robot R-JET 062 at the MIPRO 2012 MIPRO-INOVA – Innovative High-Tech Products and Services track held in Opatija, Croatia. The intention of the organizers was to gather presenters from industry and academia who have some innovative solutions of potential commercial value. Our research partner Inteco d.o.o. wanted to present their robot for hydrodynamic treatment of concrete and metal surfaces from a new R-JET robot series.
Prof. Zdenko Kovačić was a participant of the Austrian Robotics Workshop, held in Graz, where he presented the paper entitled „A Four-flipper Tracked Robot for Exploration & Inspection in Life-threatening Environments“. The conference had a goal to gather the participants of neighboring countries in the area. The workshop focused on current research themes and topics in the field of mobile, medical, field and industrial robotics, with service robotics as a special area of interest.
LARICS was present at the Festival of Science held in Zagreb, April 23-28 2012 with the workshop entitled „Walking robots – from mimicking of animals to mimicking of humans“. The festival was traditionally organized by the Technical Museum Zagreb, the British Council and the University of Zagreb. This workshop was designed as a one-hour interactive performance where Prof. Zdenko Kovačić, Alan Mutka, Damjan Miklić, Tamara Petrović, Anja Babić, Kruno Hrvatinić, and Ivan Domladovec demonstrated six-, four- and two-legged walking robots from our laboratory.
In the March issue (No. 854, pp. 42-45), one of the most popular Croatian weekly magazines Nacional contains a great article about the humanoid robots NAO produced by French company Aldebaran Robotics that came in our Lab through the realization of the €3.5 million FP7 project ACROSS. We would like to thank Tanja Šimić Jelača, a Nacional journalist, and Mateja Vrčković, a Nacional photographer, for their much-appreciated popularisation of robotics and automation among the wide population of Nacional magazine readers.
We are pleased to announce that the book chapter “Influence of Forward and Descent Flight on Quadrotor Dynamics” co-authored by M. Orsag and S. Bogdan, has been just published in the book “Recent Advances in Aircraft Technology”, edited by Ramesh K. Agarwal, Washington University in St. Luis. Publisher: InTech, ISBN 978-953-51-0150-5, 2012, pp. 141-156.
A competition for the annual University of Zagreb Rector Award for the best student’s works is now open. We would like to see some LARICS students work hard for this prestigeous award. This is also a great opportunity to remind our students that LARICS has a remarkable list of Rector Award winners until now, which can be seen in detailed news.
Last three years LARICS students were developing different bio-inspired robots. The main driving force is our wish to develop a four-legged robot that will be able to walk, trot, pace, bound, run and jump carrying a robotic rider on its back whose mission is to hit a small round target “alka” with the tip of a spear held in his hand. The inspiration for that effort comes from the legendary Croatian knight’s tournament “Sinjska alka” held every year since 1715 on the first Sunday in August in the picturesque Dalmatian town Sinj, which is situated very close to the second-largest Croatian city Split. This tournament with such a long tradition was recognized by UNESCO as the heritage of world culture.
We are pleased to announce that the book chapter “Matlab RTW-Based Internet Accessible Remote Laboratory for Teaching Robot Control” co-authored by Z. Kovačić, D. Jerbić D, V. Vojvoda, and S. Dujmović has been just published in the book Internet Accessible Remote Laboratories: Scalable E-Learning Tools for Engineering and Science Disciplines, Editor(s): Abul K.M. Azad (Northern Illinois University, USA); Michael E. Auer (Carinthia University of Applied Sciences, Austria); V. Judson Harward (Massachusetts Institute of Technology, USA), IGI Global, ISBN13: 9781613501863, 2012, pp. 362-379.
We had a visit from the Croatian National Television team led by Mrs. Lidija Gašparović who wanted to make a broadcast about the exploration robot for fire-fighting units that was developed within the homonymous project financed by the Croatian Foundation for Science (HRZZ) and Hrid d.o.o. Zagreb. Filming took part in our Lab where Goran Vasiljević and Alan Mutka showed an excellent talent for editor assistants. The broadcast was dedicated to the 10th anniversary of the HRZZ, and our project was chosen to represent the HRZZ “Partnership in Research” program.
The Croatian Chamber of Economy has awarded the annual prizes Zlatna kuna for the best achievements in the Croatian economy in 2012. The prize for Innovation was given to INTECO ROBOTICS for the development of Autonomous mobile robots for hydrodynamic treatment of concrete and metal surfaces – the R Jet – 062. It was a special moment for our Laboratory, especially for our Ph.D. students Matko Orsag and Kristijan Brkić, who were the key developers of the advanced remote control system for this robot. More information about the ceremony and other details you can find at Inteco robotics and Croatian Chamber of Economy (HGK).
These days LARICS has experienced the invasion of new robots, which rushed in good hands of our students. Six mobile robots Pioneer P3-DX from Adept mobile robots will be used in research pursued within the 6.2 M EUR FP7-IP project Estimation and Control for Safe Wireless High Mobility Cooperative Industrial Systems – EC-SAFEMOBIL. This will allow practical demonstrations of distributed safe reliable cooperation and coordination of many high mobility entities.
LARICS is participating in the 3.5 M EURO FP7-CSA project ACROSS – Centre of Research Excellence for Advanced Cooperative Systems funded by the European Commission in the period 2011-2015. One of several project goals is to strengthen the research in the area of cooperative robotic systems. For this purpose, six humanoid robots NAO H25 ATOM of Aldebaran Robotics have arrived in our laboratory. Besides for the research of Ph.D. students, these robots will also be used for many undergraduate and graduate level student projects. First impressions about NAO H25 robots can be seen in this short video.
The University of Zagreb has approved the project “Center for Computer Vision” that is funded through the University development fund. Prof. Z. Kovačić is one of the members of the Center interested in the areas of robot vision and vision-based control systems. Other members are coming from four Faculty of EE&C departments (ZESOI, ZEMRIS, ZARI, ZRK) and six other Faculties of the University of Zagreb (Faculty of Mechanical Engineering and Naval Architecture, Faculty of Transport and Traffic Engineering, Faculty of Graphic Arts, Faculty of Kinesiology, Faculty of Forestry, and Faculty of Geodesy). The center promotes collaboration between its members in the topics of computer vision and image understanding, pattern recognition and digital image processing and analysis.
VIDI e-nnovation Awards are organized annually by VIDI Magazine and Ruđer Bošković Institute. For the year 2011, the members of the evaluation committee have decided that the Nikola Tesla Silver Egg Award goes to Inteco Robotics for the originality of the R-Jet 062 Robot Advanced Control System. Being developed by our Ph.D. students Matko Orsag and Kristijan Brkić in collaboration with colleagues from Inteco, it represents an excellent example of a successful partnership between academia and industry.
FER’s Faculty Council, on its meeting held on December 14, 2011, adopted a decision on the establishment of the two new research laboratories at FER:
- Laboratory for Robotics and Intelligent Control Systems (acronym: LARICS); Head of the laboratory: Professor Zdenko Kovačić;
- Laboratory for Underwater Systems and Technologies (acronym: LABUST); Head of the laboratory: Professor Zoran Vukić;
Poster presentations of three LARICS projects, “Exploration robot for fire fighting units“, “Electronic differential for small electric vehicle” and FP7 project EC-SAFEMOBIL “Estimation and Control for Safe Wireless High Mobility Cooperative Industrial Systems” will be held on November 25th, 2011 as a part of the Faculty Day programme. The posters presentations (in Croatian) can be seen by visiting the following links: Exploration robot VIV,EC-SAFEMOBIL.
On Thursday, November 17th, our Faculty had an eminent guest, professor Hiroshi Ishiguro from the Osaka University, Department of Systems Innovation, Japan, who is one of the most well-known roboticists in the world. His astonishing achievements in the development of hyper-realistic android robots have been recognized even by Hollywood filmmakers (Surrogates). At the lecture, Prof. Ishiguro presented most of the results for which he is well-known, but also he presented the newest results related to the investigation of optimal humanoid robot form (appearance) which would most of the human population accept.
Branislav Konjević successfully defended his master thesis and received a Master of Science degree in Electrical Engineering. Branislav’s thesis was entitled “Analysis and comparison of jerk-free trajectory planning methods”. The main result of his work is two trajectory planning methods, one based on the use of the 5th-order splines, and the other based on the so-called Yakimenko method adapted for robotic applications. The results of his work were published in the Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics ICINCO 2011, Nordwijkerhout, Netherlands.
The European Commission, under the 7th Frame Program, has provided funds to perform the project ACROSS (Centre of Research Excellence for Advanced Cooperative Systems). The ACROSS project aims to unlock and strengthen the research potential of the Faculty of Electrical Engineering and Computing at the University of Zagreb (UNIZG–FER) for the benefit of the national, as well as the regional and EU community with the global objective to create a Centre of Research Excellence for Advanced Cooperative Systems within UNIZG–FER.
The European Commission, under the 7th Frame Program, has provided funds to perform the project SAFEMOBIL (Estimation and Control for Safe Wireless High Mobility Cooperative Industrial Systems), recognizing the growing importance of the UAV market and applications, which in the case of SAFEMOBIL project, are related to the utilization of autonomous systems in general and UAVs in particular, in many applications that cannot be accomplished with manned systems for including disaster management, the monitoring and measurement of events, rescue missions, particularly in stormy conditions and, in general all mission where there are risks for human beings.
Darko Dužanec successfully defended his doctoral dissertation and received a Doctor of Science degree in Electrical Engineering. Darko’s thesis was entitled “Improved microgenetic algorithms in control of robot systems”. The main results of his work are the method for determining optimal parameters of microgenetic algorithms based on known parameters of the optimal genetic algorithm, a thorough analysis of the microgenetic algorithm based on the use of Markov chains, and the introduction of a new solution space contraction parameter which increases the precision of the solution. The results of his thesis were published in several conference papers: 1, 2, 3.
LARICS Ph.D. student Darko Dužanec and Prof. Zdenko Kovačić were participants of the 6th IEEE International Conference on Industrial Technology that was held at the Monash University near to Melbourne. There Darko presented the newest results of his work on a doctoral dissertation in the paper entitled „Performance Analysis-based GA Parameter Selection and Increase of μGA Accuracy by Gradual Contraction of Solution Space“. Prof. Kovačić chaired two sessions related to robotics and control.
On February 4, 2009, two LARICS students, Ivan Hoško (advised by Prof. Bogdan) and Saša Mesarić (advised by Prof. Kovačić) successfully defended their diploma theses and became diploma engineers. Ivans thesis was entitled “Image processing on Gumstix microprocessor system”, while Sasas thesis was “The use of RFID technology in flexible manufacturing system”. The results they achieved will be very useful for gaining experience with the state-of-the-art control hardware, as well as with the technology which can increase the FMS flexibility.
LARICS and INTECO d.o.o. Zagreb signed a one-year contract to work together on the R&D project “Control of a robot for hydrodynamic processing of concrete and metal surfaces“. The project consists of two parts – improving the existing robot prototype R-JET 061, and developing a first commercial robot with improved control characteristics R-JET 062. Both partners have prepared a collaborative project application that was submitted to the state agency BICRO – IRCRO. As a part of this application, a one-year annex to the aforementioned contract was signed whose aim is to develop some advanced control features of the robot.
Ivica Draganjac and Alan Mutka spent two weeks in San Antonio, the USA where they worked together with colleagues from Hrid d.o.o, Zagreb on testing of developed applications for robot control and 3D visualization of the robot for inspection of nuclear reactor vessels. This work was performed within the collaboration on the project ”Control system for a reactor vessel inspection manipulator”.
On December 16, 2008, two LARICS students (both advised by Prof. Kovačić) successfully defended their diploma theses and became diploma engineers. Maja's thesis was entitled “Control of planar manipulator with electronically commutated motors”, while Vedran's thesis was “Multi-user interface for access to the robotic laboratory via the internet”. We believe that the results they achieved will serve as a basis for building a well-structured internet accessible laboratory (IAL).
Croatian Society for Robotics (CSR) organized the 2nd CSR Workshop “Robotic Systems 2008” which was held in the National Technical Centre in Kraljevica. About thirty people from the Croatian technical high schools community and Croatian academia gathered together to discuss their ideas about possible ways of introducing elective robotics courses into the technical high school curriculums. Prof. Zdenko Kovačić and Prof. Stjepan Bogdan played important role in the organization and participation in the event.
Great news has come to LARICS! The National Foundation for Science, Higher Education and Technological Development of the Republic of Croatia has given a grant for the two-year scientific project “Exploration robot for firefighting units”, which is also financially supported by our industry partner Hrid d.o.o., Croatia. The goal is to develop a fully functional robot prototype able to find and get in contact with victims of fire, earthquakes and other sources of life danger.
By obtaining the grant for the project “Exploration robot for fire fighting units”, we have got funds to engage two more people to come to work in LARICS! Kristijan Brkić who just graduated (see the news from November 18) and Marko Cukon (still the student of the Mechanical Engineering) are new employees who will work together on the construction and building of the exploration robot prototype.
LARICS and HRID d.d. Zagreb signed a four-month contract to work together on the project “Control system for a reactor vessel inspection manipulator“. The project consists of two parts – making an application for advanced servo control of the robot, and an application for robot guidance and 3D visualisation of robot-based inspection. The manipulator to be controlled is built in San Antonio, USA. The robot control system uses the state-of-the-art servo controller Aerotech A3200.
On November 18, 2008, three LARICS students (first two advised by Prof. Bogdan, and the third by Prof. Kovačić) successfully defended their diploma theses and became diploma engineers. Krešo’s thesis was entitled “Control of assembly line”, Vladimir’s thesis was “Interaction of agents in the flock following the predator-prey principle”, while Kristijan’s thesis was “Modeling and Construction of a self-balancing mobile robot with two parallel wheel drives”. The results they obtained were really excellent.
Prof. Zdenko Kovačić was a participant of the 2nd IEEE International Conference on E-Learning in Industrial Electronics where he presented the paper entitled „An Internet-based System for Remote Planning and Execution of SCARA Robot Trajectories“. The conference was organized in parallel with the 34th Annual Conference of the IEEE Industrial Electronics Society (IECON-2008). It was nice to find out that our concept of internet accessible laboratory was competitive with similar concepts developed by research groups from Vienna, Maribor, and Athens.
After Alan Mutka had broken ice in October, LARICS students Ivica Draganjac, Maja Varga, and Matko Orsag have also got 6-year contracts to work as young scientists in the LARICS research team. Ivica is going to work on the research project 036-3017 “Integrated Control of Robotic Systems in Complex Environments”, while Maja and Matko will work on the research project 036-3016 “Task Planning & Scheduling in Robotic and Autonomous Systems”.
We have received a valuable donation from Kolnoa, Croatia: a MOBOTIX IP camera that has many advanced features: 1280 x 960 Megapixel resolution, 30 frames/s, weatherproof, video motion, night/day etc. The camera will be used for the development of intelligent security video-based applications. We express our gratitude to our donator, Mr. David Geras, and his colleagues from Kolnoa.
On October 30th, 2005, Damir Arbula successfully defended his master thesis and received a Master of Science degree in Electrical Engineering. Damir’s thesis was entitled “Distributed algorithm for anchor-free network localization based on the determined direction of signal arrival”. The main result of his work is a distributed localization algorithm which minimizes the need for extensive communication and computing effort. Congratulations!
On October 21, 2008, four LARICS students (all advised by Prof. Bogdan) successfully defended their diploma theses and became diploma engineers. Vinko’s thesis was entitled “Model reference-based adaptive control by using Lyapunov method“, Damir’s thesis was “Adaptive system control with Honeywell PLC”, Dinko’s thesis was “System parameter identification algorithm as a function block for Simatic PLC”, while Tihomir’s thesis was “Control of Mitsubishi robot by using program Leonardo”. They all did excellent jobs and some of the results they obtained are already used in a new set of laboratory exercises.
On October 13, a broadcast about robots on Mars was emitted on the Croatian National Television channel 2 (HRT2). One part of it was made in our Lab where Tamara Petrović, Ivica Draganjac, Alan Mutka, and Andjelko Katalenić dragged out our Wifibot robots and also showed some results of their research work. The broadcast was dedicated to younger scholars so we all had a lot of fun. Ivica recorded the show when it was on air to keep something to show to Marsians if they ever come to our Lab.
In the wide expanse of Kapela, a very special place belongs to the complex of Bijele stijene (White Rocks), quite unique, indeed incomparable, in their splendor (read more). LARICS team decided to get there and climb to the top and thus prove that even impossible can be possible. A brave group of climbing enthusiasts did not give up even in the moments when hazy and foggy atmosphere hid the most of the beauty around them when they reached the top. Slightly frozen and fairly tired, we were delighted to find a shelter with a fire stow where we ate and drank everything we had in our sacks.
LARICS research team has become stronger as our project collaborator Alan Mutka has got a 6-year contract to become employed as a young scientist working on the research project 036-3017 “Integrated Control of Robotic Systems in Complex Environments”. His main topic of research is the intelligent environment interpretation by using robot vision.
LARICS took part in the presentation of a robot for hydrodynamic processing of concrete elements that was built by the Croatian company INTECO, Zagreb. LARICS built a command console for that robot. Demonstration carried out at the location of the hydropower plant Varaždin was very successful and plans for future collaboration between INTECO and LARICS were discussed during and after the event.
LARICS has got a valuable donation from Schneider Electric, Zagreb – the latest version of PLC Modicon M340 and two brushless DC motor drives to be mounted on a planar robot arm. Motors are equipped with precise gearboxes and resolvers. This will allow our Lab to develop a new robot that will be useful for demonstration of modern robot control concepts.
We have received a valuable donation from DAMCO, Croatia: a planar robot MAJA. The robot will be a very important element of an Internet Accessible Laboratory (IAL). We express our gratitude to our donator, Mr. Vladimir Dam, the owner of the company and the member of the alumni of the Faculty of Electrical Engineering and Computing in Zagreb.
On September 16, 2008, LARICS student Ivan Pankretić (advised by Prof. Bogdan) successfully defended his diploma thesis and became a diploma engineer. Ivan’s thesis was entitled “Microprocessor system for control of a 2 DOF platform”. The results he obtained will serve for further work on that subject.
Prof. Stjepan Bogdan attended 2008 IEEE Multi-conference on Systems and Control in San Antonio, USA. He presented the paper “Fuzzy logic navigation in multi-agent systems”. During his stay in San Antonio, Prof. Bogdan met with chairmen of the previous and the future IEEE MSC conferences. It is our pleasure to announce that 2012 IEEE MSC will be held in Dubrovnik.
LARICS student Kristijan Brkić is building a two-wheel self-balancing mobile robot as a part of his diploma thesis. So far the body of the vehicle, as well as the power and control modules, are finished and prepared for functional testing.
Also, LARICS Ph.D. students Ivica Draganjac and Alan Mutka have built a console for control of robots developed by Croatian company Inteco used in the sanation of concrete buildings. (see the picture in detailed news content)
It is our great pleasure to announce that the latest results of the research work on the control of a helicopter as an unmanned aerial vehicle are presented in the paper Palunko I.; Bogdan S.; "Small Helicopter Control Design Based on Model Reduction and Decoupling" that is published in the Journal of Intelligent and Robotic Systems, DOI: 10.1007/s10846-008-9260-3, 2008.
LARICS Ph.D. student Damjan Miklić received a Fulbright Scholarship Award for the period of August 01, 2008 – May 31, 2009. He is going to the laboratory of Prof. Rafael Fierro at the University of New Mexico, Albuquerque, USA. The subject of his research there will be control of robot formations.
Two excellent ex-LARICS students Ivana Palunko and Domagoj Tolić will join LARICS Ph.D. student Damjan Miklić in the laboratory of Prof. Rafael Fierro at the Electrical & Computer Eng. Department of the University of New Mexico, Albuquerque. They have received a full scholarship and they will be enrolled in the Ph.D. program under advisorship of Prof. Fierro.
It is our great pleasure to inform you that LARICS student Maja Varga has become a recipient of the Top Stipendship for the Top Students Award for the year 2008. Her perfect accomplishments during studying qualified her for this prestigious award. Congratulations!
On July 10, 2008, seven LARICS students (all advised by Prof. Bogdan) successfully defended their diploma theses and became diploma engineers. Davor's thesis was entitled “Mathematical model of a current transformer”, Lana’s thesis was “Grid-based formation control”, Luka’s thesis was “Swarm simulation and modeling”, Denis thesis was Fuzzy state controller, Matko’s thesis was “Hybrid control of quadrotor”, Mario’s thesis was “Hovercraft based on asymmetrical condenser”, and finally, Maja’s thesis was “Fuzzy control of quadrotor”. They all did excellent jobs and they picked a perfect timing for graduation before a long hot summer.
It is our great pleasure to announce that the results of the work on the project “Advanced Control of Industrial Plants – Road Tunnel Ucka Ventilation Control System” are presented in the paper Bogdan S.; Birgmajer B.; Kovačić Z.; Model predictive and fuzzy control of a road tunnel ventilation system, that was just published in the Journal on Transportation Research Part C, Vol. 16, No. 5, 2008, pp. 574-592.
IFAC World Congress is organized by the International Federation of Automatic Control every three years. This year at the 17th IFAC World Congress in Seoul, Korea, LARICS Ph.D. student Alan Mutka defended LARICS colors by presenting the paper “A low-cost vision-based localization system using fiducial markers”. Alan was impressed by the size of the event and perfect organization which included the presentation of new humanoid robots designed especially for research.
In two hot July days, we have got first 16 LARICS Bachelors of Science who successfully defended their Bachelor Theses and thus finished the three-year studying program according to the “Bologna agreement”. Their names are as follows: Ivan Dijan, Ivan Jakuš, Davor Jerbić, Luka Kalinovčić, Ante Kapuralić, Tomislav Kavur, Natasa Kovjanović, Petar Mateljak, Lovro Milanković, Šime Mrša, Dijana Namlić, Isak Nuhić, Marijo Radman, Robert Ranteš, Marko Rudman, Zoran Vrhovski. We hope to see them all advancing towards the M.Sc. degree.
This year LARICS was very active at the IEEE International Symposium on Industrial Electronics – ISIE 2008 that was held in Cambridge, England, at one of the most famous and oldest universities in the world. ISIE is one of the major conferences organized by the IEEE Industrial Electronics Society. Zdenko Kovačić was the Track Co-Chair for Control, also he chaired two sessions (one oral and one poster). Ivica Draganjac and Damir Arbula presented their papers, “Dual Camera Surveillance System for Control and Alarm Generation in Security Applications” and “Distributed Algorithm for Anchor-Free Network Localization Using Angle of Arrival”, respectively. On July 3, 2008 we were sightseeing in London during the sunniest day ever (we had only three heavy showers which was excellent).
There is a tradition of active participation of LARICS researchers at the Mediterranean Conferences on Control and Automation. This year at the MED’08 held in Ajaccio, France where Stjepan Bogdan presented the paper entitled “Dynamic Routing in Multi-AGV Systems Based on Extended Banker Algorithm” showing the latest results in this attractive research area.
Although she was that close to Disneyland, Ivana found enough inspiration to first successfully present her paper “Small Helicopter Control Design Based on Model Reduction and Decoupling” at the International Symposium on Unmanned Aerial Vehicles that was organized by Prof. Kimon Valavanis in Orlando, USA. Do not worry, she had enough time to visit Disneyland and besides many nice gifts, she brought nice memories back home.
Tamara had her first-ever paper presentation in Seattle, the hometown of Microsoft, where she actively participated in the prestigious 2008 American Control Conference. The title of the paper was “Matrix-Based Approach to Sequence Analysis in Multiple Reentrant Flowlines” where a method for extension of matrix model of manufacturing system was presented in order to provide an efficient tool for analysis of systems with various dispatching sequences of shared resources. After she broke the ice, we expect from Tamara to continue with her successful work.
Nominated as the first and second best candidates of the Faculty of EE&C, two LARICS student groups: i) Davor Mihaljević, Robert Ranteš and Petar Mateljak, ii) Zoran Vrhovski, Ivan Jakuš, Nataša Kovjanović, have become the recipients of the 2008 Rector Award for their student works entitled “Robotic Alka” and “Visual feedback-based RC blimp control“. We are really proud that a nice tradition is continued – eight Rector Awards of students from our Lab received in the last eight years.
Our distinguished guest, Prof. Miklos Vajta, visited the Faculty of Electrical Engineering and Computing and held the invited lecture on the stability and approximate solution of a second order, nonlinear parabolic partial differential equation with given boundary- and initial conditions. A typical problem is to determine the transient temperature distribution of solids for given initial- and boundary conditions.
FunkyMem is a new online magazine that covers different themes of human life including ethics, philosophy, sports, technology, culture and many others. FunkyMem issue No.4 brings an interview with Prof. Zdenko Kovačić who spoke about the future of robotics and its influence on our everyday lives.
LARICS has been present at the Festival of Science held in Zagreb, April 21-26 2008 by organizing two Workshops, Fifi – Remotely controlled mobile platform, and Smart Zeppelin. The festival is traditionally organized by the Technical Museum Zagreb, British Council and the University of Zagreb.
LARICS student Nikola Rosić successfully defended his diploma thesis entitled “Control system for a 2 DOF platform”. The task Nikola successfully solved was to develop a nonlinear dynamic model of a 2 DOF platform using Matlab. Then he developed a linear control program for positioning of a ball on the real laboratory platform. The positioning was accomplished by controlling two servo motors using the information from a mounted video camera.
LARICS research team has become stronger as our ex-student Tamara Petrovic has got a 6-year contract to become a young scientist working on the research project 036-3016 “Task Planning & Scheduling in Robotic and Autonomous Systems”. Her main topic of research is advanced control of discrete event systems.
New study program at our Faculty gave the chance to the students of the third year to work together in the groups of 6-8 people on some practical projects. Twenty students advised by LARICS teachers worked on three projects: “Smart Zeppelin Control”, “4-legged horse robot”, and “Knight with a spear robot”. To the big surprise of all students, who were not yet aware of their great capabilities, the results of the projects and related project presentations were really excellent.
Excellent news for LARICS in the first days of New Year! The project proposal “Exploration robot for fire fighting units” that was prepared in collaboration with Ziegler d.o.o. Zagreb and submitted to the National Foundation for Science, Higher Education and Technological Development of the Republic of Croatia (NZZ), has been positively assessed by international reviewers and accepted for funding during a two-year period (2008/09).
LARICS student Miroslav KovaČ successfully defended his diploma thesis entitled “Modeling, simulation, and control of city traffic”. It is well known that traffic jams are part of our everyday life in big cities. Miroslav attempted to create a nonlinear model of city traffic regulated by traffic lights, taking into account the number of vehicles and their speed. The whole work was done using Matlab and the simulation results showed very useful and interesting relations between the frequency of vehicles and the duration of traffic lights` turn on-turn off intervals.
Croatian Society for Robotics (CSR) organized the 1st Scientific-professional CSR Workshop “Robotic Systems 2007” which was held in the National Technical Centre in Kraljevica. About thirty people from the Croatian robotic industry and Croatian academia gathered together to present their work and discuss possible ways of bilateral and multilateral collaboration. During the round-table discussion, the representative of the Ministry of Science, Education, and Sports, Mrs. Gordana Prutki-Pečnik presented possibilities of submitting the collaborative project proposals to the Eureka and FP7 funding programs. LARICS team (Zdenko Kovačić, Stjepan Bogdan, Alan Mutka, Ivica Draganjac) played important role in the organization and participation in the event.
In only three years Professor Stjepan Bogdan fulfilled all conditions necessary to get a promotion to the Associate Professor position. Professor Bogdan will be remembered as the first Assistant Professor working at the Faculty of Electrical Engineering and Computing who advanced to higher position two years before the expiration of a usual five-year election period. Congratulations!
It is our great pleasure to inform you about the great success of the Zagreb University Informatics teams at the CERC 2007 – The 2007 ACM Central European Regional Contest that was held in Prague, November 09-12, as a part of the International Collegiate Programming Contest. Among 67 teams from 34 Central-European universities, the first Zagreb team led by third-year LARICS student Luka Kalinovčić won the second place and thus, qualified for the world competition of 80 world best teams, that is going to be held at the Banff Springs University, Alberta, Canada. The second Zagreb team, whose member was LARICS student Davor Jerbić, won the fifth place, which is also an excellent result.
Our laboratory has purchased and installed an educational version of SolidWorks – software for 3D design of mechanical constructions. The software will be used by the third-year LARICS students who are working on their projects – the construction of Alkar – a robotic knight on a horse with a spear used to hit alka (a metal cast circular object).
It's a great pleasure to announce that three LARICS students, Ivana Palunko, Mario Dogan, and Danijel Milišić successfully defended their diploma works. Ivana worked on modeling, simulation and control of a helicopter. Mario used genetic algorithms to generate control sequences for a straight and circular motion of a hexapod robot. Just to give you a flavour of what has been done, you can see a short movie (13 MB) showing the straightforward motion of the hexapod robot with the blocked front right-hand leg. Danijel developed an application for face recognition using a low-cost web camera.
Stjepan Bogdan and Zdenko Kovačić were participants of the 2007 IEEE Multi-conference on Systems and Control that joined two well established annual conferences of IEEE, International Conference on Control Applications (CCA), and International Symposium on Intelligent Control (ISIC), this time in Singapore. Spending several days in a tropical paradise with palm trees and orchids at every street corner of extremely beautiful Singapore city, was a great experience (“Image courtesy of the Singapore Tourism Board”).
It was a day to remember! Nine LARICS students (eight of them advised by Stjepan Bogdan) successfully defended their diploma works: Robert Pavlović, Vedran Bobanac, Borna Buntić, Andrija Eršek, Matko Medenjak, Saša Orešković, Tamara Petrović, Domagoj Tolić, and Tomislav Vlah. There is no need to mention that all of them did excellent jobs. Tamara graduated with highest honors – her score through all five years of studying is unbeatable – 5.0! Others were not far from that. It will be interesting to see whether we will have such extraordinary graduation day again. We wish all of them to have great professional careers!
Again three (see the previous news), but different LARICS students, being the third best candidates of the Faculty of Electrical Engineering and Computing, Maja Varga, Matko Orsag and Mario Dogan have become the recipients of the 2007 Rector Award for their student work entitled “AHRS-based control of a quadrotor”. Let us just proudly say that LARICS students have continued a remarkable achievement – ten Rector Award laureates from our Lab in the last seven years. Let`s celebrate!
Three LARICS students, Tatjana Djebro, Ivana Fazini, and Vedran Sesar, successfully defended their diploma works. Tatjana built a mathematical model of a Zeppelin type of a blimp and designed an LQ controller for navigation control. Ivana designed a fuzzy controller for control of a 2 DOF laboratory aeroplane by using fuzzy Lyapunov stability criteria and fuzzy numbers. Vedran added a client application to Leonardo program which enabled control of SCARA robot Kiwi via TCP/IP. Now it is possible to plan trajectories by using Leonardo, send references to Kiwi and execute the trajectories.
Stjepan Bogdan and Zdenko Kovacic participated in the MED07 post-conference Workshop on Networked Systems for Intelligent Sensing and Control organized by Professors Panos Antsaklis and Manolis Christodoulou in Kalamata, a picturesque Greek resort known worldwide for extra quality virgin olive oil. Stjepan's paper “Decentralized decision making in multi-agent systems” presented a methodology for decision making in the systems with multiple agents driven not only by repulsion and attraction forces but also by a self-generated force. Zdenko`s paper “Network-based System for Intelligent Video Surveillance, Control and Alarm Generation in Security Applications” described the implementation of an integrated video-based surveillance system able to perform different tasks such as detection of human motion, recognition of human objects, counting people traffic, as well as keeping record of a current number of people in the surveyed area.
Although challenged by a rich social program of the REV07 Conference, let us just mention the visit to the famous Taylor`s porto winery, Nenad Smolic-Rocak found enough time and inspiration to present the paper entitled “Matlab Real-Time Workshop-based Internet Accessible Robot Control Laboratory”. He returned to our lab with a lot of enthusiasm regarding our ambitious plan to build a virtual and remote control laboratory.
This year LARICS was very active at the 15th Mediterranean Conference on Control and Automation in Athens, Greece. Zdenko Kovačić was a Program Chair, Stjepan Bogdan was a Paper Review Process Coordination and Program Logistics Chair, while Tomislav Reichenbach was responsible for the Paper Submission Coordination. Darko Dužanec, Stjepan Bogdan and Zdenko Kovačić presented their papers in front of the elite audience. On June 26, 2007, we were sightseeing the Acropolis during our hottest day ever (thermometers registered unbelievable 47 degrees Celsius).
LARICS Ph.D. student Damjan Miklić has become a young scientist working on the research project 036-3016 “Task Planning & Scheduling in Robotic and Autonomous Systems”. His main topic of research is advanced control of robot formations. Besides, he will continue collaborating at the technological project “Autonomous mobile sensor platform for closed space surveillance and cleaning”.
It is our great pleasure that Ziegler d.o.o. Zagreb has decided to engage LARICS R&D team to develop a program simulator for training of firemen working with the command console for pumps on the Ziegler`s fire fighting vehicles. We believe that this is only a beginning of a fruitful long-term collaboration. You can see below the vehicle manufactured for the Zagreb Airport (the courtesy of Ziegler).
Our long-term collaboration with Croatian company Exor Control Engineering, Zagreb, has been confirmed by signing a new contract for the year 2007. Main LARICS contributions are expected in the improvement of the previously developed systems for paper machine control.
A LARICS student Siniša Dujmović successfully defended his diploma work entitled “Control of SCARA robot Kiwi from Matlab via TCP/IP”. In his work, the Matlab Real-Time Workshop (RTW) is used as a backbone of the Internet accessible robot control laboratory. For this purpose server and client function blocks for Simulink were built as a connection to the Internet and target robot control hardware, respectively. The paper describing the implementation of the system has been submitted for possible presentation at the International Conference on Remote Engineering and Virtual Instrumentation.
Two LARICS students, Zlatko Horvat, and Vjeran Magdić, successfully defended their diploma works. Zlatko`s thesis was entitled “Development of Elements of SCADA System for Web Browsers”, while Vjeran's was “Supervision and Control of Gravel Separation Process”. Both theses got excellent grades, first describing the implementation of the Web SCADA connected through the OPC server with the industrial PLC, while the second one describing the PLC-based solution of the automaton for the gravel separation facility. Good job, guys!
We are very pleased that the two projects proposed to the Croatian Ministry of Science, Education, and Sports are going to be sponsored in the period 2007-2009. The first one, “Integrated Control of Robotic Systems in Complex Environments,” was proposed by Prof. Zdenko Kovačić, and the second one, “Task Planning and Scheduling in Robotic and Autonomous Systems” was proposed by Prof. Stjepan Bogdan. Both projects are also participating in the scientific program “Intelligent Robotic Systems and Autonomous Vehicles” led by Prof. Ivan Petrović.
We are happy to announce that two LARICS students successfully defended their diploma works. Marko`s thesis was entitled “Control of Parker Servo System with Ultimodule Control Unit”, while Danijel`s was “Self-learning Fuzzy Controller as a Simatic PLC Function Block”. Both theses got excellent grades, first describing an Internet-based control of the industrial servo system (part of the Viremco project), while the second one describing the implementation of the sensitivity-based self-organizing fuzzy controller as a block for the widely used industrial PLC. Congratulations to both of them!
Professor Zdenko Kovačić was elected for a new president at the annual summit of the Croatian Society for Robotics. Professor Stjepan Bogdan has become a member of the Executive Committee, and Nenad Smolić-Ročak is a new member of the Supervisory Committee. Croatian Society for Robotics gathers people interested in the promotion of robotics in education, business, science, and arts.
Professors Zdenko Kovačić and Stjepan Bogdan were on the USA tour visiting two universities – The Oklahoma State University (OSU) in Stillwater and the University of Texas (UTA), The Automation and Robotics Research Institute (ARRI) in Arlington. They gave a thorough presentation of LARICS research work and had fruitful discussions with Professor Rafael Fierro and his colleagues about enhancing collaboration between two entities.
Another two students from our Lab successfully defended their diploma theses. Lana's thesis was entitled “Modeling and control of the FESTO assembly line”, while Josip's was “Control of a nonholonomic mobile robot formation”. Both of them have achieved very good results – Lana was able to program the system with an arbitrary order of assembly operations, while Josip solved some problems related to changes in robot formations under serious constraints.
Tehnomobil j.t.d., Zagreb donated ten books Z. Kovacic, S. Bogdan “Fuzzy Controller Design: Theory and Applications” to the library of the Department of Control and Computer Engineering. Thanks to that valuable donation, books will be available to all students interested in this area of intelligent control. Tehnomobil and LARICS collaborated on the development of a complex simulator for testing equipment used in building automation.
Bruno Birgmajer, Zdenko Kovačić, Damjan Mikli, and Nenad Smolić-Ročak presented their papers at the 2006 IEEE Conference on Control Applications (CCA), Symposium on Computer-Aided Control Systems Design (CACSD) and International Symposium on Intelligent Control (ISIC) that was held in Munich, Germany. Besides a busy conference schedule, the LARICS team (with Stjepan Bogdan) found enough energy to join the Oktoberfest festivities.
On September 28th, 2006, Bruno Birgmajer successfully defended his Masters Thesis and received a Master of Science degree in Electrical Engineering. Bruno's thesis was entitled “Integrated vision system for supervision and guidance of a steam generator tube inspection manipulator”. The main result of his work is a vision-based control system fully tested in the nuclear power plant in Lianyungang, China (see the news of July 19, 2006). Congratulations, Bruno!
Two of our students successfully defended their diploma theses and thus became engineers. Damir`s thesis was entitled “Automated design of fuzzy control algorithms by using state-space trajectories”, while Alan`s thesis was entitled “Implementation of a control system for indoor cleaning mobile sensor platform”. Both theses were excellent, Damir`s resulting with the accepted conference paper at the IEEE International Symposium on Intelligent Control 2006 in Munich, Germany, and Alan`s resulting in the successful integration of sonar and digital compass into the mobile sensor platform control system based on the donated state-of-the-art Ultimodule hardware.
As a part of a project with Croatian company HRID-NDT d.d, specialized in non-destructive testing, LARICS has developed motion control and visual supervision systems for the HRID steam-generator tube inspection manipulator. The developed systems were put to the test during an inspection of the Tianwan nuclear power plant in Lianyungang, China, and passed with flying colors. Bruno Birgmajer, who carried out most of the job, will present the results in his Master Thesis scheduled for defense in September, as well as in the conference paper accepted for presentation at the IEEE International Symposium on Intelligent Control 2006 in Munich, Germany.
A delegation from Albert Ziegler Gmbh – Mr. Schelle, Mr. Habazin and Mr. Dužanec visited our Lab to investigate possibilities of starting a long-term R&D collaboration. Ziegler is a company specialized for manufacturing of fire-fighting vehicles and accompanying equipment. The main topic of discussions was an introduction of smart mobile robots for exploration of spaces burning in fire.
Being the second best candidates of the Faculty of Electrical Engineering and Computing, LARICS students Ivana Palunko and Andrija Eršek have become the recipients of the 2006 Rector Award for their student work entitled “Fly-by-wire control of a helicopter model”. We are really proud that Ivana and Andrija continue a tradition – seven Rector Award laureates from our Lab in the last six years. Bravo for both of you!!
During his visit to the Faculty of Electrical Engineering and Computing, Prof. Timothy Chang from the New Jersey Institute of Technology, Department of Electrical and Computer Engineering, spent some time with us in our Lab. Since his research interests are in advanced servo systems and robotics, we had a great opportunity to discuss possible ways for intercontinental cooperation.
Our distinguished guest, Professor Frank. L. Lewis visited the Faculty of Electrical Engineering and Computing and held the invited lecture on wireless sensor networks and their control based on the effective matrix-based approach.
Our student Katarina Bodor successfully defended her diploma thesis entitled “Implementation of a Two-way Communication Interface in Matlab for Control of Aeroplane Laboratory Setup” and thus became a diploma engineer. Her plans are to go to Spain and spend three months on practice in one Spanish company. Congratulations!
The Springer Verlag London has just published the book “Manufacturing Systems Control Design: A Matrix-based Approach”, coauthored by Stjepan Bogdan, Frank.L. Lewis, Zdenko Kovačić, and J. Mireles. The book is the result of more than 10 years of collaboration between LARICS and Prof. Lewis in the discrete events systems control area. The book contains valuable contributions from several LARICS students.
Our student Ivica Draganjac successfully defended his diploma thesis entitled “Control of a 2 DOF Aeroplane Setup” and thus became a diploma engineer. He did an excellent job as he succeeded to control a fully unstable setup of two degrees of freedom airplane. Congratulations!
LARICS has got a valuable donation from Siemens, Zagreb – equipment for working with RFID (Radio Frequency Identification) technology. This will allow our Lab to develop new concepts of RFID-based FMS control as well as other RFID-based applications (e.g. automated registration of garbage collection).
Croatian companies Alarm Automatika, Rijeka; EXOR, Zagreb, Telital mobitel, Zagreb, and XYLON, Zagreb signed contracts to collaborate on the technological project “Autonomous mobile sensor platform for closed space surveillance and cleaning” that is financially supported by Sitek S.p.A., Italy and by the Croatian Ministry of Science, Education and Sports.
LARICS and HRID d.d. Zagreb signed a one-year contract to work together on the project “Control system for a 3DOF steam generator tube inspection manipulator“. It is worth to mention that the result of the project will be the manipulator that is completely designed by Croatian engineers. The control system is based on the Ultimodule hardware already used in the Lab for control of a SCARA robot KIWI. Besides servo control, LARICS will develop an integrated vision system for supervision and guidance of the manipulator.
Our student Ranko Munk successfully defended his diploma thesis entitled “Control of SCARA Robot KIWI via Internet” and became a diploma engineer. Here you can see the outlook of user`s GUI (client) for control of the robot. Congratulations to Ranko!
Dr. Wolfgang Drewelow and Dr. Olaf Simanski from the Institute of Automation, University of Rostock, Germany have come in Zagreb to spend one week in the Department of Control and Computer Engineering. Their visit is a continuation of the fruitful 45-years long collaboration between Rostock and Zagreb Universities. In the lecture entitled “Current Research Projects in the Institute of Automation”, our guests presented their recent research results in the fields of marine control, automotive control, and control in medicine. Dr. Olaf Simanski contributed to the book “Fuzzy Controller Design: Theory and Applications” (see previous news) with the chapter on fuzzy control of anesthesia.
We are proud to announce that the book “Fuzzy Controller Design: Theory and Applications”, coauthored by LARICS lecturers Zdenko Kovačić and Stjepan Bogdan has been published by the CRC Press. The book is the result of 15 years of authors' work in the fuzzy control area and it contains also many contributions from LARICS students.
Our student Dražen Petrovečki successfully defended his diploma thesis entitled “GSM/GPRS Technology-based Wireless Measurement and Control Device” and became a diploma engineer. Here you can see the device which is fully functional and allows further development of wireless measurement and control applications. Congratulations!
One of the most popular Croatian computer journals VIDI in the December issue (No. 117, pp. 40-41) contains a very nice article about robotic projects that are going on in our Lab. The article is entitled “Terminator 4: LARICS online”. We would like to thank Saša Kovačiček, a VIDI journalist, for his much-appreciated popularisation of robotics and automation among VIDI readers.
On November 25th, 2005, Nenad Smolić-Ročak successfully defended his master theses and received a Master of Science degree in Electrical Engineering. Nenad`s thesis was entitled “Flexible manufacturing systems control by using matrix algebra". The main result of his work is a web tool for design, simulation, and control of flexible manufacturing systems FlexMan. Congratulations!
Great news have come to LARICS that the Croatian Ministry of Science, Education and Sports has given a grant for the two-year technological project “Autonomous mobile sensor platform for closed space surveillance and cleaning”, which is also supported by the industry partners Sitek s.p.a., Italy, Exor Control Engineering, Croatia, Telital Mobitel, Croatia, Alarm Automatika, Croatia and Xylon, Croatia.
A very important meeting was hosted by LARICS, where representatives of Siemens d.d., Zagreb, CAKOM d.o.o, Čakovec, and LARICS found agreement to start joint cooperation on the development of applications based on the RFID (Radio Frequency IDentification) technology. RFID is becoming more and more popular in many practical applications including intelligent material handling systems.
Three LARICS students successfully defended diploma theses and became diploma engineers. Goran's thesis was entitled “Program Tool for Operation with Petri nets and Matrix Models” and the main result is Petri.NET Simulator which is turned into a commercial product (shareware SW) and already used by our students in the Flexible Manufacturing Systems course (see Figure).
We are very happy that Krešimir Petrinec has become the recipient of the Faculty of Electrical Engineering & Computing award for the academic year 2004/2005 – the silver plaque Josip Lončar for his outstanding Masters Thesis entitled “Internet-based System for Supervision and Control of the Fish-farm”. Currently, Krešimir is working as a visiting researcher in the research lab of Prof. Marcian Cirstea, Anglia University, Cambridge, Great Britain. Bravo!
Our student Mladen Tomić successfully defended his diploma thesis entitled “Modeling, Simulation and Control of FESTO FMS” and became a diploma engineer. Here below you can see an interesting detail from his thesis. You may also see a short movie FlexMan_FESTO.avi showing the results of the simulation. Congratulations!
Our planar robot iCAD900, a donation from Systems Extensione, Ferndale, Australia, is growing fast and soon it will become a real SCARA beauty. We named it KIWI, after a beautiful endangered bird from New Zealand. Mr. Zeljko Postruzin from HRID d.o.o., Zagreb designed the construction of a 2 DOF mechanical extension having 1 prismatic and 1 revolute joint. You can compare the results of today's assembly with real kiwi and KIWIs model below.
One of the most popular Croatian journals for computer fans VIDI has decided to write several articles about news in robotics technology. A few weeks ago they visited our Lab and discussed with us about self-replicating robots designed at Cornell University. Themes like robot soccer or control of robotized warehouses could be among the first that will appear in the next VIDI issues.
Being the second best candidate of the Faculty of EE&C, LARICS student Alan Mutka has become the recipient of the 2005 Rector Award for his student work entitled “TELEGPRSm -Teleoperative Measurement System”. We are very happy that Alan continues a fantastic line – five Rector Award laureates from our Lab in the last five years. Congratulations!
Two Parker brushless DC motors and servo amplifiers are new equipment acquisitions in the Viremco (Virtual and Remote Motion Control) Lab. These motors and amplifiers are directly compatible with lately donated ULTIMODULE servo controllers.
Today we have reached the agreement with colleagues from HRID d.o.o., Zagreb to build a four DOF SCARA robot based on the donated two DOF planar manipulator iCAD900. The whole project is expected to be finished until the end of July 2005.
We are proud to announce that the latest results of the LARICS research are published in the chapter – Tomislav Reichenbach, Zdenko Kovačić, “Collision-Free Path Planning in Robot Cells Using Virtual 3D Collision Sensors “, pp. 683-706 of the book “Cutting Edge Robotics” published by ARS and edited by A. Lazinica.
Two Maxon DC motor servo amplifiers and one brushless DC motor servo amplifier are new equipment acquisitions in the Lab. They will allow a construction of new servo devices with advanced control characteristics.
A convoy of five Wifibots – four-wheeled mobile robots has arrived in our Lab. This is our biggest acquisition in this year as the whole investment was worth more than 16 thousand euros. We expect that new robots will boost our research in formation robotics, multi-robot control, and control based on the usage of wireless sensor networks.
Two LARICS graduate students, Tomislav Reichenbach, and Mario Punčec, successfully defended their master theses and received a Master of Science degree in Electrical Engineering. Tomislav's thesis was entitled “Collision Avoidance in Virtual Robotized Plants”, while Mario's was entitled “Fuzzy and Adaptive Control Methods for Application in Servo Systems”. Congratulations!
Eminent Croatian scientist and professor at the Faculty of Mechanical Engineering and Naval Architecture in Zagreb, prof. dr. Mario Essert delivered a very interesting lecture about the developed technology and software tool called Scriptrunner that allows everyone connected to the Web to create interactive digital books and live pdf documents in a very easy way. We also heard interesting presentations given by Ph.D. student Josip Kasać (Stability of fuzzy control systems) and by LARICS students Ivica Draganjac and Marko Sesar.
We have received a valuable donation from Systems Extensione, Ferndale, Australia: a planar robot iCAD900. The robot will be a very important element of a Virtual and Remote Motion Control Lab (VIREMCO lab). We express our gratitude to our donator, Mr. Ignac Popović, the owner of the company and the member of the alumni of the Faculty of Electrical Engineering and Computing.
We are happy to announce that LARICS Ph.D. student Damir Arbula has got the official status of a young scientist. Welcome aboard! His topic of research is anchor-free localization and control of agents in mobile wireless sensor networks.
We are proud to announce that the latest results of the research cooperation with the group of professor Frank L. Lewis from the ARRI, Arlington, Texas, are published in the chapter – Mireles Jose, Lewis Frank L., Gurel Ayla, Bogdan Stjepan, “Deadlock Avoidance Algorithms and Implementation, a Matrix Based Approach”, pp. 182-231 of the Marcel Dekker/CRC Press book “Deadlock Resolution in Computer-Integrated Systems” published in December 2004 and edited by Mengchu Zhou and Maria Pia Fanti.