


 Project name: Unmanned system for maritime security and environmental monitoring
Project name: Unmanned system for maritime security and environmental monitoring
Project acronym: MORUS
Dates: 01.04.2015 - 28.02.2019
Total budget: 834,929.00 EUR
Funding: NATO Science for Peace
Grant Agreement number: 984807
website: www.fer.unizg.hr/morus
MORUS
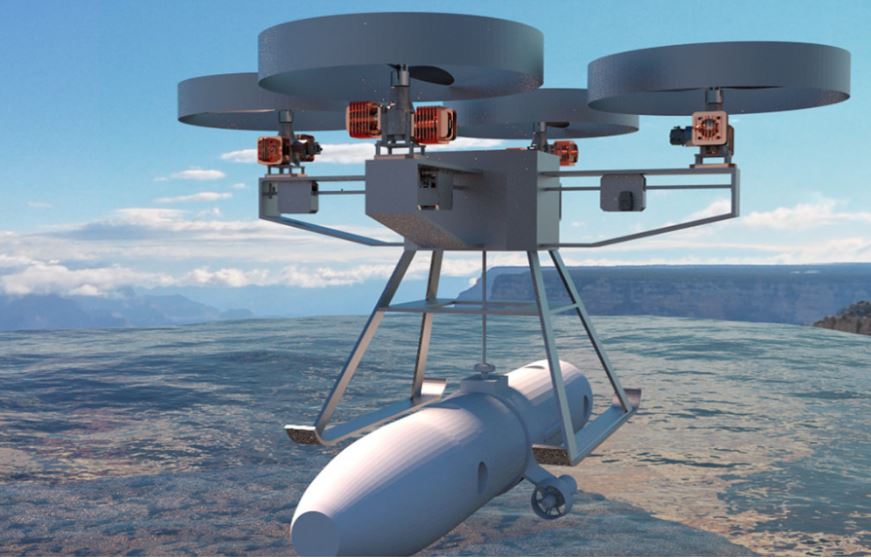
The main goal of the MORUS project is the design and development of a fully operational complex robotic system prototype comprised of an Unmanned Aerial Vehicle (UAV) and an Unmanned Underwater Vehicle (UUV) capable of autonomous and cooperative mission executions related to environmental, border and port security.
The proposed research is part of an internationally competitive field, with the main objective to design and develop an autonomous aerial and marine robotic system which is capable of collective engagement in missions taking place in dynamic and nondeterministic environments.
MORUS objectives are summarised as follows:
- Design and construction of an UAV with docking and transportation mechanisms,
- Visual-feedback-based docking and gripping algorithm,
- Design of an augmented-reality and easy to operate human-machine interface for simultaneous control of aerial and marine robots,
- Enhancement of the autonomous navigation capabilities and operational supportability in remote locations with little or no local support,
- Agile UUV redeployment through cooperation with an UAV,
- Data exchange between the UUV and UAV through cooperative control and estimation.

Project partners:
- Laboratory for Robotics and Intelligent Control Systems, University of Zagreb, Faculty of Electrical Engineering and Computing
- University of Limerick
- University of Sarajevo, Faculty of Electrical Engineering
- Laboratory for Underwater Systems and Technologies, University of Zagreb, Faculty of Electrical Engineering and Computing
- University of Dubrovnik
LARICS participated in DRONEfest 2017, presenting our recent results in collaborative projects EUROC and MORUS. The presentation included both a live demo of wind turbine inspection, the work completed under EUROC project, as well as a display of the MORUS UAV. Matko Orsag gave a talk titled “Heterogeneous robotic systems for inspection and interaction with the environment”.