


 Project name: Structured Ecological CULtivation with Autonomous Robots In Agriculture
Project name: Structured Ecological CULtivation with Autonomous Robots In Agriculture
Project acronym: SPECULARIA
Dates: 01.06.2018 - 31.05.2023
Total budget: 1,794,905.62 HRK
Funding: Croatian Science Foundation (HRZZ)
Project number: UIP-2017-05-4042
Website: http://specularia.fer.hr/
SPECULARIA
This project deals with concepts of compliant robot control, soft robotics, and heterogeneous robotic systems and utilizes them to help farmers in indoor organic agriculture.
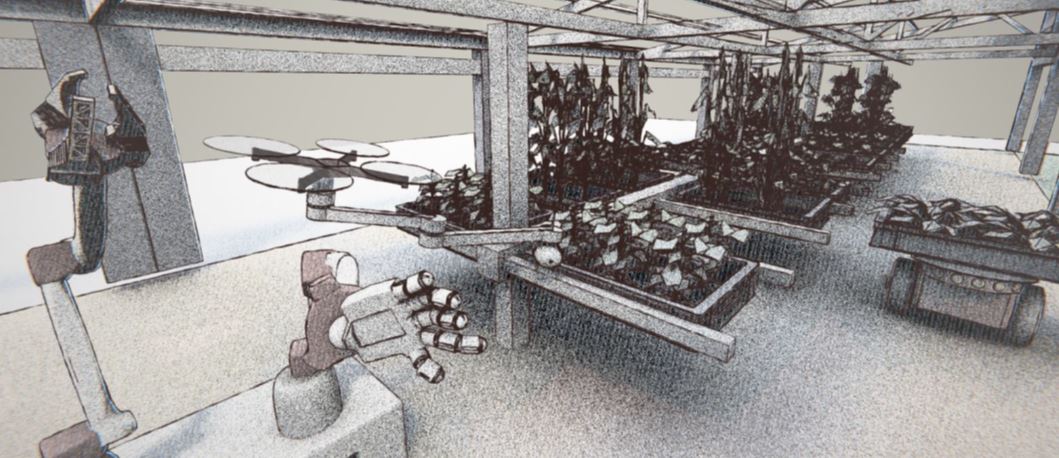
The main goal is to develop a heterogeneous robotic system comprised of three agents: an Unmanned Aerial Vehicle (UAV), Unmanned Ground Vehicle (UGV), and a compliant multi-degree-of-freedom manipulator. The UAV is equipped with a lightweight multi-degree-of-freedom manipulator carrying sensors for plant surveillance. The manipulator enables the UAV to fly outside the danger area, where its prop wash wind gust can damage the plant. The UGV is equipped with a mechanism that allows it to transport growth unit containers, which are the smallest organization unit within the farm, consisting of a single or variety of plants. The compliant manipulator’s task is to perform delicate handling of plants, such as flower and fruit manipulation, and plant pruning. Each robot has a specific set of abilities, but when put to work together, they can be applied to achieve versatile goals in an unstructured environment, which an indoor organic farm most certainly is.

UAV with manipulator for inspection
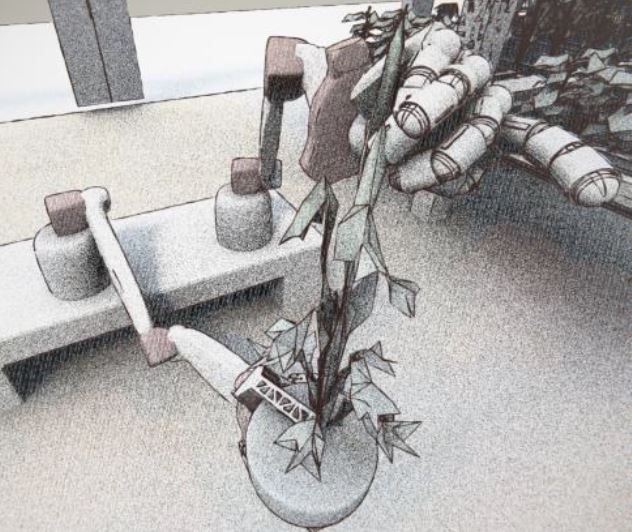
Compliant manipulator for plant treatment

UGV for container transport
Matko Orsag and Marsela Polic went to Macao (China) to attend another International Conference on Intelligent Robots and Systems (IROS 2019). Marsela Polic presented a paper titled “Convolutional Autoencoder for Feature Extraction in Tactile Sensing”, co-authored by Matko Orsag, Ivona Krajacic and Nathan Lepora. LARICS members were in China from 2nd to 9th November 2019 and actively participated in the Conference.