


 Project name: Twinning coordination action for spreading excellence in Aerial Robotics
Project name: Twinning coordination action for spreading excellence in Aerial Robotics
Project acronym: AeRoTwin
Dates: 01.09.2018 - 28.02.2022
Total budget: 997,897.50 EUR
Funding: EU Horizon 2020, CSA - Coordination and support action
Grant Agreement number: 810321
Website: https://aerotwin.fer.hr
AeRoTwin
AeRoTwin is an EU H2020 Twinning project coordinated by the Laboratory for Robotics and Intelligent Control Systems - LARICS from the University of Zagreb Faculty of Electrical Engineering and Computing (UNIZG-FER).
The overarching goal of AeRoTwin is to decrease networking gaps and deficiencies between UNIZG-FER and internationally leading counterparts in EU, by significantly enhancing the S&T capacity of LARICS at UNIZG-FER in the field of aerial robotics. Through carefully planned twinning actions, AeRoTwin will raise the UNIZG-FER research profile, as well as the research profile of its personnel.
UNIZG‐FER will through AeRoTwin enhance its networking capacity and scientific visibility; improve the quality of innovation management and technology transfer; and also increase its research excellence and innovation capacity in the field of aerial robotics, in the following Strategic Research Domains (SRDs):
- Cooperative robotic missions
- Aerial robot navigation
- Aerial robot configurability
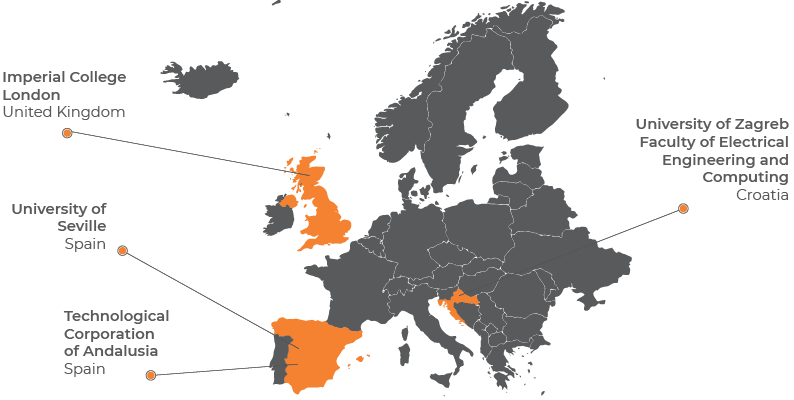
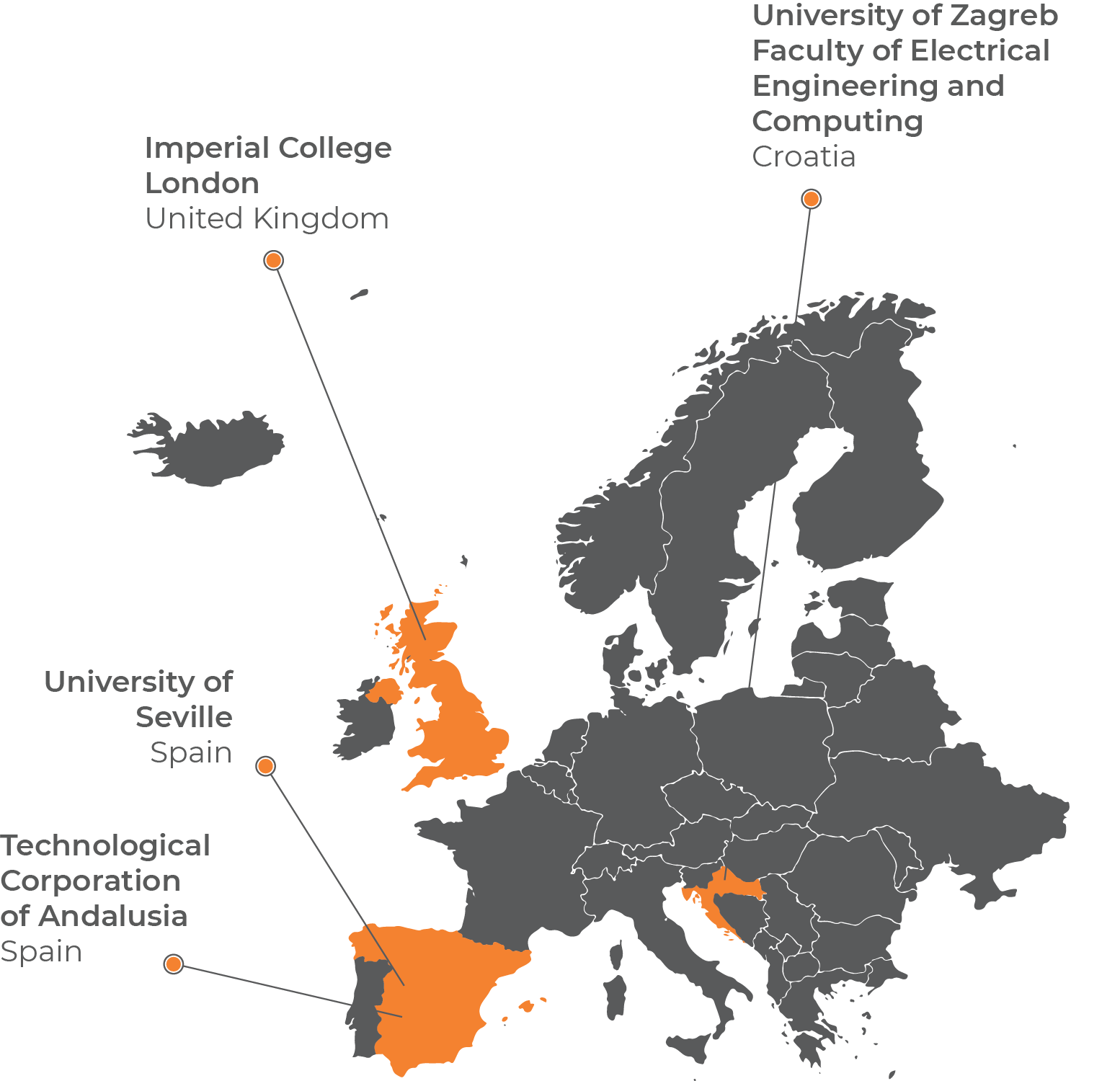
Partners:
- University of Seville (USE), Spain
- Imperial College London, UK
- Technological Corporation of Andalusia, Spain
News
Antun Ivanović and Lovro Marković (UNIZG FER) visited the Swiss Federal Laboratories for Materials Science and Technology (EMPA) for a week in February 2022. While at the facilities, they worked closely with Prof. Mirko Kovac (ICL), EMPA researchers David Häusermann, Fabian Wiesemüller, and Cedric Portmann, and ICL researchers Bahadir Kocer, Lachlan Orr, and Oscar Pang.
They have continued the collaboration established by Bahadir Kocer's visit to UNIZG FER in February 2020. The team is collaborating on the development of an aerial robotics team for autonomous construction. They are developing planning and control algorithms and exploring new materials and adhesives to enable efficient and robust autonomous construction with a team of drones.
During their stay, they have been working on integrating aerial systems from the two groups and preparing for ICL's upcoming visit to UNIZG FER for further experimental verification in preparation for a joint publication.
During Staff Exchange 2, Research Plan, the LARICS team visited partner CTA and US facilities. LARICS Project Manager Vlatka Kovačević met with the Project partner CTA (Technological Corporation of Andalusia) Head of Aerospace Sector Silvia de los Santos and Consultant Marta Marcias and Communication Department Officers Marisol Castro Rey and Natalia Gutierrez Roa.
The goal of this short-term visit was to provide UNIZG-FER project management staff with direct insight into administrative processes in CTA that are related to innovation management and technology transfer. Vlatka has also with Silvia and LARICS Team (Robert Milijaš and Marko Križmančić) visited CATEC (Advanced Center for Aerospace Technologies).
The main outcome of this trip was the enhancement of the reputation, attractiveness, and networking channels of LARICS and raising the profile of its staff thanks to knowledge exchange (best practices, lessons learned).
In the last series of visits in the AeroTwin staff exchange program, LARICS PhD students Marko Križmančić and Robert Milijaš spent three weeks at the University of Seville (USE), Spain from January 15 to February 6. They were working at the Department for Systems and Automatic Engineering under the supervision of Professor José Ramiro Martinez de Dios. Marko worked on designing a new mission planning algorithm for multi-robot systems with the help of USE professor Ivan Maza, while Robert compared the SLAM algorithms and hardware used by the GRVC group at USE to the approaches used in LARICS. During the exchange, several fruitful meetings were held which resulted in plans for future scientific publications.
Due to circumstances caused by the pandemic situation, AeRoTwin project partners had submitted amendment request to extend the project by 6 months. The amendment has been granted and the new end date of the project is 28 February 2022.
The pandemic has affected the majority of project activites, especially those where alternative to real life implementation was not possible, e.g. activities within work packages know-how exchange and networking and visibility (e.g. short-term visists, hands-on on-site trainings, participation at industry fairs, etc.)
LARICS team attended Breaking the Surface 2020 workshop from September 27 to October 4, 2020. This was the 12th edition of this international intersiciplinary field workshop of marine robotics and its applications, held every year in Biograd na moru, Croatia.
LARICS members actively participated in the workshop programme with their PhD presentations and tutorials, and attended lectures by AeRoTwin partners from the University of Seville (J. Ramiro Martinez de Dios, Augusto Gómez Eguíluz, Julio L. Paneque) and Imperial College London (Mirko Kovac, Crystal Winston, Andre Farinha, Julien di Tria), and the invited talk by Ivana Palunko (University of Dubrovnik) organized within H2020 AeRoTwin project.
Photos are available in the Gallery.
Our PhD students Antun Ivanovic, Lovro Markovic, Marko Krizmancic and Ana Batinovic attended the 2020 IEEE RAS Summer School on Multi-Robot Systems hosted at Czech Technical University in Prague from 14th to 18th of September 2020. The Summer School program aims at promoting the newest achievements in multi-robot system research.
The main scope of the program was swarm robotics, including lectures by well-recognized experts in the field, group seminars, computer practicals, and outdoor experiments. Moreover, the Summer School was a great opportunity for networking with other participants and lecturers.
You can find more about the Summer School at http://mrs.felk.cvut.cz/summer-school/
Check out photos in the Gallery.
On 12 March 2020, the review meeting of the first 15 months of the project implementation period (01/09/2018 - 30/11/2019) of project AeRoTwin was held online via WebEx due to special circumstances (COVID-19). The purpose of the meeting was to familiarize the project officer and the EC reviewer with the project activities and achievements accomplished in the relevant period.
Along with the project officer Antonio Scarafino and the EC reviewer, the review meeting was attended by AeRoTwin coordinators Stjepan Bogdan and Ivana Mikolić, as well as the leaders of work packages (WPs) and project team members Silvia de los Santos (CTA), José Ramiro Martinez de Dios (USE), and Ashutosh Choubey (ICL). During the meeting, project partners had the opportunity to present their respective WPs and discuss relevant issues as well as the plan for the upcoming period.
Prof. Zdenko Kovacic attended European Robotics Forum (ERF) that was held 3-5 March 2020 in Malaga, Spain. Prof. Kovačić joined AeRoTwin project partners from the University of Seville, José Ramiro Martinéz de Dios, and Silvia de los Santos from Technological Corporation of Andalusia in promoting AeRoTwin project, attending lectures and workshops, and networking.
This was the 11th Annual European Robotics Forum ‘Future Robotics: Unlocking Human Potential’ hosted by Trade Fair and Congress Centre of Malaga (FYCMA). This iconic event put Spain at the heart of Europe’s most influential forum for robotics and artificial intelligence (AI).
More about ERF 2020 at https://www.eu-robotics.net/robotics_forum/press/malaga-inspires-erf202.html
The H2020 project "Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin" and Laboratory for Robotics and Intelligent Control Systems - LARICS invite you to the lecture:
"Human-robot collaboration to extend space missions through telerobotics"
by
Dr. Neal Y. Lii, German Aerospace Center (DLR)
which will be held on 6 March 2020 at 09:40 in the Auditorium Hall at the Faculty of Electrical Engineering and Computing, Zagreb, Croatia. The lecture will be held within European Space Agency (ESA)- Croatia regional workshop 'Space powering the Green Deal and the Digital Economy'.
On Saturday, 1 February 2020, LARICS members Marko Križmančić, Robert Milijaš and Antonella Barišić hosted around 20 second-grade students from the Elementary School Ksaver Šandor Gjalski in the LARICS lab.
The students had the opportunity to see LARICS' robots operate, and to learn about their functionalities in a simple and interesting way. The students also learned about different types of robots, how they move and perceive the world around them. Robot arm Franka was giving out candy and picking up items which caused a lot of excitement.
The students got to operate spheric robots Sphero and walking robots STEMI using a mobile phone application. The students had most fun interacting with the dancing humanoid robot Pepper. They also expressed great interest in UAVs and remote controlling. Everyone learned a lot of new things and the hosts had a difficult task answering all the questions.
Check out photos and students' drawings inspired by the visit in the Gallery.
LARICS members attended the three-day Robotics Fair 2020 in Ljubljana that took place from 11th to 13th February 2020. Robotics is an international trade fair dedicated to industrial robotics and unmanned systems. The event offers the exhibitors a platform for presenting their range of robot technologies in both industrial and service robots sectors.
The Fair was organised by ICM Slovenia. LARICS members attended the event as representatives of three UNIZG FER laboratories: LARICS, LABUST and LAMOR, under the common brand ROBOTICS FER, next to some of the top tech companies in this field. The visitors had an opportunity to learn about current projects of UNIZG FER's laboratories', their research, innovations and equipment.
All the exhibitors also had excellent opportunities to strengthen their image, increase brand awareness and establish new business relationships. The content-rich accompanying programme included roundtable discussions, presentations and workshops.
On 8 January 2020, Ivana Mikolic held an invited talk within the 5th year course Organisation and Management at University of Zagreb Faculty of Economics and Business. Ivana was invited by the Dr. Rebeka Danijela Vlahov together with Andrej Hanzir (LEAP Summit) to share knowledge and experience in managing EU projects. After the introductory presentations, a panel discussion was initiated between the guest lecturers and the students.
In the first week of February 2020, Basaran Bahadir Kocer, from the Imperial College London, together with our own Marko Krizmancic and Antun Ivanovic, worked on experiments as part of collaboration within AeRoTwin project.
The main goal was building a wall with teams of aerial vehicles specialized for spreading infil mixture between brick layers, and brick pickup and placement. The team developed a mission planner for aerial vehicles collaboration and conducted experiments on a mockup scenario.
On Thursday, 23 January 2020, Prof. Felipe Gonzalez, Associate Professor at Queensland University of Technology (QUT) in Brisbane, Australia, will give a lecture on “Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation”. The lecture will be held at 11 a.m. in room C-09-01.
Dr. Gonzalez interest is in creating aerial robots, drones or UAVs that possess a high level of cognition using efficient on-board computer algorithms using advanced optimization and game theory approaches that assist us to understand and improve our physical and natural world. Dr. Gonzalez lead the Airborne Sensing Lab at QUT. He is the co-author of several books in UAV based remote sensing and UAV based design based on evolutionary optimization and game strategies and as of 2018 has published nearly 130 refereed papers. He is also a Chartered Professional Engineer, Engineers Australia – National Professional Engineers Register (NPER), a Member Royal Aeronautical Society (RAeS), The IEEE, American Institute of Aeronautics and Astronautics (AIAA) and Holder of a current Australian Private Pilot Licence (CASA PPL) and a Remote Pilot Licence (RePL from CASA).
The H2020 project "Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin" and Laboratory for Robotics and Intelligent Control Systems - LARICS invite you to the lecture: "Real-World Robotics: From Swarms to Entrepreneurship" by Daniel Lofaro, George Mason University, which will be held on 18th December 2019 at 12:00 in the Gray Hall of the Faculty of Electrical Engineering and Computing, Zagreb, Croatia.
The lecture is organized under the programme Robotics Food Court which is supported by the U. S. Embassy in Croatia.
More about the speaker and the talk can be found in the detailed news content or here.
The new project “AERIAL Cognitive Integrated Multi-task Robotic System with Extended Operation Range and Safety (AERIAL-CORE)”, which commenced on December 1, 2019 , is another joint project of FER (LARICS) and their AeRoTwin partners - University of Sevilla, which has taken up the role of the project coordinator in this project, and Technological Corporation of Andalusia (CTA), among others.
The main objective of AERIAL-CORE is the development of core technology modules and an integrated aerial cognitive robotic system that will have unprecedented capabilities on the operational range and safety in the interaction with people, or Aerial Co-Workers (ACW), for applications such as the inspection and maintenance of large infrastructures.
The project will integrate aerial robots with different characteristics to meet the requirements of:
- Long range (several kilometres) and local very accurate (subcentimetre) inspection of the infrastructure capability;
- Maintenance activities based on aerial manipulation involving force interactions; and
- Aerial co-working safely and efficiently helping human workers in inspection and maintenance.
This year LARICS team members are organizing again a robotic charity event, together with KSET and professors from the University George Mason (USA), with the goal to raise funds for the Association for improving the quality of life of poor and neglected children “Mali zmaj”. All the planned activities are taking place between December 15 and 19, 2019 at KSET and in the Faculty’s lobby. The programme of the ROBOWEEK is the following:
- on Sunday, December 15, 2019, from 8 to 11 p.m., on KSET’s stage, the visitors will have the opportunity to attend a unique performance of the ROBOBAND! Robots will be warming up the audience and spreading holiday cheer by playing different instruments, accompanied by FER’s professors and students;
- on Monday, December 16, 2019, professors from the University George Mason (USA) will hold a lecture for FER’s graduate and postgraduate students, and a lecture for the general public to present their science popularization projects;
- on Thursday, December 19, 2019, from 10 a.m. to 6 p.m., in FER’s lobby, at the ROBOTIC FOOD COURT, our well-known little robotic helpers Pepper, Franka and Baxter will be serving warm drinks and cookies, while primary and secondary school students will have a chance to attend interactive ROBOFUN workshops.
The co-organizers of the event, University of George Mason professors are planning to hold a similar event in April 2020 at their University.
We wholeheartedly invite you to join us in doing a good deed and spreading joy!
LARICS, LABUST and LAMOR did a great job representing UNIZG-FER at the University of Zagreb Fair 2019 held between November 21 and 23, 2019 at the Student Centre Zagreb, and at the Open Door Day at FER on Saturday, November 23, 2019. Future students and visitors had the opportunity to talk to the members of our laboratories, check the equipment, interact with Pepper, compete against Baxter in solving a Rubik’s cube, and try out navigating the autonomous surface platform H20mniX in an indoor pool! The visitors were also able to learn about the laboratories’ current projects, activities, and prospects of studying at FER.
AeRoTwin Coordinators prof. Stjepan Bogdan and Ivana Mikolić participated at national Horizon 2020 Info Day on Spreading excellence and widening participation programme on 24th October 2019. Stjepan presented Twinning project AeRoTwin as an example of excellent written proposal and implemented project.
Stjepan and Ivana then participated in a Q&A session with representatives from other faculties and institutes in order to share their knowledge and experience and increase proposal submission from Croatia.
Ivana Mikolić held an invited lecture "Managing EU scientific-research projects" at the University of Dubrovnik on 10th of October 2019. More than 30 University's teaching and administrative staff participated in the lecture. The lecture was organized in the scope of AeRoTwin project and by the IEEE Oceanic Engineering Society University of Zagreb Student Branch Chapter.
The lecture presented in detail all phases of the projects - from proposal writing, to project implementation, and to evaluation. The possibilities of using EU funds from different programmes were presented. Project preparation and management were elaborated through practical examples. All project phases were presented from a technical, managerial, financial and administrative perspective. The aim of the lecture was to gain a better understanding of EU projects, proposals and calls, as well as the tools used to manage them.
After seeing our work through Dronedays and AeRoTwin activities, we were invited by several companies to investigate the posibilities of future collaboration.
We were first invited by Koncar and Atos Hrvatska to the Pometeno Brdo windfarm on 2 July 2019 to demonstrate the capabilities of our UAVs in wind turbine inspection tasks. With supervision from Jurica Goričanec from Geoarheo, our Kopterworx UAV performed all planned tasks and results we obtained are looking promising for a future collaboration. We were also invited by Geodetski zavod Rijeka to the Grobnik airport on 9 July 2019 to showcase 3D mapping and georeferecing capabilities of our UAV. Gathered data is still being processed, but we hope it will facilitate interesting future collaborations.
Within NATO SfP project MORUS and EU project AeRoTwin, Lovro Marković and Marko Car attended the European Control Conference from 25th to 28th of June, 2019 in Naples, Italy. At the conference Lovro presented their paper titled Geometric Tracking Control of Aerial Robots Based on Centroid Vectoring.
Their paper focuses on presenting the concept of geometric tracking control for an unmanned aerial vehicle (UAV) based on variations in centerof gravity (CoG). The proposed UAV model has the ability to exploit its dynamic CoG as a means of stabilization and control. A mathematical model of such a system is used as a base for developing the nonlinear geometric tracking controller on the special Euclidean group SE(3). Finally, two unique UAV models, presented with a trajectory tracking problem, are simulated in a realistic simulation environment. Performance of the selected control terms is analyzed based on relevant simulation results.
The paper titled Centroid vectoring control using aerial manipulator: Experimental results was presented by Antun Ivanović at the international conference IEEE International Conference on Unmanned Aircraft Systems within projects Specularia and AeRoTwin. The conference was held 11-14 June 2019 in Atlanta, USA.
This paper addresses the issues of aerial manipulation and its dynamic center of mass variations by deriving a control principle capable of exploiting this disturbance as a means to stabilize the UAV. The UAV utilizes both rotors variations and centroid vectoring for attitude control and the control structure was further augmented with position control. The main focus is on experimental validation of the system.
The first edition of our two-day end-user aerial vehicles workshop DroneDays, held at the University of Zagreb Faculty of Electrical Engineering and Computing in Zagreb, Croatia, on 26 and 27 March 2019, was a great success and exceeded all of our expectations. Over 200 participants listened to 17 lectures by aerial robotics experts, there were 9 demonstrations in the flying zone, and some 2000 visitors came to the company expo to learn about aerial vehicles and their applications. DroneDays was organized by UNIZG-FER and LARICS as part of the project AeRoTwin. Read more about our exciting event in the detailed news!
Our Lab's project manager Ivana Mikolić went on 29th March 2019 to the LEAP Summit in Zagreb, Croatia, where she held a lecture at the EU & ME Stage titled "Increasing robotics research excellence with the EU". Ivana talked about her experiences in managing EU and Croatian projects, why they are important and how they can be used to advance our scientific and technological potential. Ivana also gave some recent examples of LARICS and LABUST projects, such as AeRoTwin and DroneDays, to show how EU funding can successfully be applied in the context of robotics in Croatia and the EU.
Members of our lab went to Bucharest, Romania, on 19 to 24 March, to take part in the European Robotics Forum 2019 to represent the robotics@fer.hr brand, which includes three robotics laboratories from the University of Zagreb Faculty of Electrical Engineering and Computing: LARICS, LABUST and LAMOR. There they took part in lectures and workshops, presented their work and some of the laboratories' robots and brought our work closer to the public and the robotics community.
Professor Stjepan Bogdan went to Abu Dhabi to take part in the 2019 International Symposium on Robotics and Artificial Intelligence on March 10 and 11, where he held a lecture in the Aerial and Underwater Systems session. The lecture was titled "Aerial Robotics – manipulation and interaction with the environment", dealing with the topic of present results in aerial robotics done in our Lab, particularly when it comes to the problem of controlling the force of interaction between an aerial vehicle equipped with a dexterous manipulator and the environment. You can find more info on the event, as well as a book of abstracts, by following this link.
Our asst. prof. Matko Orsag appeared on 7th March 2019 as a guest speaker for the Croatian National Television's show Dobar Dan, Hrvatska to talk about technological advancements in robotics, particularly aerial robotics, and to introduce the public to our upcoming two-day end-user workshop on aerial robotics, DroneDays. The show also featured a segment on our laboratory and what LARICS members do for this field of technology. Prof. Pero Škorput from the Faculty of Transport and Traffic Sciences, who will appear at DroneDays as an invited lecturer, was also a guest in the show to talk about the future of traffic and transport. The whole show can be seen via the HRTi service (in Croatian; registration is necessary).
During the ERL Local Emergency Tournament in Seville, our AeRoTwin Project Coordinator Ivana Mikolić met with project partner CTA Aerospace Technical Officer Silvia de los Santos and consultant Marta Macías for the first AeRoTwin Short Term Visit, where she learned about the CTA model of innovation cluster and technological transfer. Ivana, Silvia and Marta visited the CTA facilities, talked to Silvia about their business and research strategies, and found out more about their equipment, projects etc. and visited the Advanced Center for Aerospace Technologies (CATEC). This was the first in a line of short-term management oriented visits which will help us improve our laboratory's R&D capacities during the project.
LARICS team members took part in the European Robotics League Emergency Local Tournament on 18-23 February in Seville, Spain, where they achieved amazing results - they won first place overall, as well as best ground team! During the five days of the competition, they worked hard on developing their ground and aerial robots, making them work together autonomously in various environments, and they even found the time to take part in the 1st AeRoTwin Training and 1st AeRoTwin Short Term Visit with project partners from the University of Seville and Technological Corporation of Andalusia. This hard work paid off and was rewarded with the great results they achieved. We would like to congratulate our colleagues for their efforts and achievments, and wish them even more success in the future! You can find a gallery from the tournament here.
This month we will be going to Seville, Spain, to take part in the European Robotics League Emergency Local Tournament 2019! Our team has been pre-selected for this competitive and interesting event, so we will have to combine our knowledge of ground and aerial robots to make them work together. They will have to be as autonomous as possible, capable of coordinating through both indoor and outdoor environments and will have to perform specific advanced tasks. We are working very hard for this competition and are looking forward to taking part in it!
On February 18 and 19, 2019, our team will be going to Seville to take part in the first AeRoTwin hands-on training with the title Drone Localization and Mapping. The training will be held at the Robotics, Vision and Control Group (GRVC ) Lab premises in Seville, Spain, and our lecturers are experienced members of this lab and the AeRoTwin project team, who will help us learn more about drone localization and mapping, the newest developed techniques and technology, the theoretical background and practical applications. You can find out more about the content of the training, the lecturers and related institution by following this link.
The first edition of our DroneDays event is soon approaching, so the organizers of the event, Ivana Mikolić, Stjepan Bogdan, Matko Orsag and Frano Petric told us more about what visitors can expect at the workshop. We have published their interview at the DroneDays website and you can read it under detailed news content. Registrations for the event are now open - register by following this link!
DroneDays is a two-day workshop focused on unmanned aerial vehicles which will be held on 26th and 27th March 2019 at UNIZG FER premises in Zagreb, Croatia. The programme consists of keynote lectures, an exhibition area, as well as a flying zone, and is focused on unmanned aerial vehicle applications and end-user industries. It will serve as a meeting place for experts from the industry and academia, end-users, as well as regulatory bodies from the region.
We have an exciting announcement: the first edition of DroneDays, a two-day workshop focused on unmanned aerial vehicles and their end-users, will be held in Zagreb at our Faculty on 26th and 27th March 2019. The programme of the event will consist of keynote lectures, an exhibition area and a flying zone, and the event will serve as a meeting place for experts from the fields of industry and academia, end-users, as well as regulatory bodies from the region. We invite you to save the date for the first edition of DroneDays, as there is a lot in store for the event! For more up-to-date information, please visit the official DroneDays website.
The H2020 project "Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin" and Laboratory for Robotics and Intelligent Control Systems - LARICS invite you to the lecture: "Bioinspired Aerial Robots for Infrastructures" by Mirko Kovač, Imperial College London, which will be held on 27th September 2018 at 09:00 in the Seminar Room of the Department of Control and Computer Engineering on the 9th floor of the Faculty of Electrical Engineering and Computing, Zagreb, Croatia.
More about the speaker and the talk can be found in the detailed news content or here.
Continuing with the trend of the Lab being very active, we went to Biograd na Moru (HR), where the tenth (birthday!) edition of Breaking the Surface was held from 30th September until 7th October. Our members wento to lectures, visited demonstrations, took part in tutorials, visited a workshop and let's not forget - partied ;) Check us out at the Great Gatsby Party and Karaoke Party!
On 15th October, prof. Stjepan Bogdan and Matko Orsag presented five new projects developed in our Lab at a scientific symposium “New research projects at UNIZG-FER”. They have presented recently started projects: AEROTWIN, ENCORE, MBZIRC, SPECULARIA, and ENDORSE. At the symposium, the emphasis was put on possibilities of cooperation with economic operators as well as job opportunities on projects from young professionals and experienced researchers.
Prof. Stjepan Bogdan and Ivana Mikolić, who are the coordinators of our new project AeRoTwin, are currently in Brussels attending the TWINNING Coordinators Day organized by the European Commission. They will attend presentations, meet experts in this area and learn a lot about how they can work on and improve the project in the future. They also used this opportunity to meet the AeRoTwin Project Officer in Brussels.
Attending one of the presentations:
Meeting the PO:
It's been a very active time for our Lab, as our Lab members went to Rijeka, Croatia, to present our work and particularly equipment at the Rijeka Nautic Show as part of our new AeRoTwin project. Three of our colleagues were there, prof. Stjepan Bogdan, Marko Car and Lovro Marković, and they presented the UAV designed during the MORUS project.
The Kick-off meeting of our new project, AeRoTwin, was held on September 26th, 2018 in Zagreb, at our Faculty. The meeting was attended by our Lab members, partners working on the project from the University of Seville, Imperial College London and the Technological Coropration of Andalusia, as well as a member of the Advisory Board - there was a lot to talk about!
All of the attendees introduced themselves and briefly described what they will be doing as part of the project, and other topics discussed included the dates of future meetings and other planned activities. The meeting was a great success, which is a great sign for the future of the project! Take a look at the gallery from the meeting by folowing this link.
As announced, dr. Mirko Kovač from the Imperial College London held a presentation with the title "Bioinspired Aerial Robots for Infrastructures", as part of our new project AeRoTwin, where he described his previous and current work in this area, as well as what might be in store in the near future. The invited lecture was attended by many of our students and staff and they learned a lot, asked questions and found out more about this incredibly interesting area of robotics. The gallery of the lecture can be found here. Thank you, dr. Kovač!
LARICS is the coordinator of a new project: Twinning coordination action for spreading excellence in Aerial Robotics - AeRoTwin, part of the H2020 Twinning programme. AeRoTwin is a coordinated twinning action aiming to spread excellence in aerial robotics. The partners on this project are the Imperial College of London, the University of Seville and the Technological Corporation of Andalusia.
The project's net worth is almost 7 and a half million HRK (almost €1 million). The project starts September 1st, 2018.
Project coordinators prof. Stjepan Bogdan, PhD and Ivana Mikolić, mag. ing. pointed this out:
"AeRoTwin is the first H2020 project to be coordinated by LARICS. It is the crown of our 10 years of research in the field of robotics and unmanned aerial vehicles," prof. Stjepan Bogdan explained.
"This project will offer LARICS, and by extent also the Faculty of Electrical Engineering and Computing, the chance to take part in European research and to be on equal footing with other leading international institutions in the EU. The project will increase the scientific and research capacities of the Laboratory through its many education and training activities," Ivana Mikolić said.